Mostly unnoticed (at least for myself), SEGGER has enabled some of the J-Link debug probes to support the CMSIS-DAP debug protocol.

This greatly enhances the use of J-Link debug probes for CMSIS-DAP based tools.
Continue reading
Mostly unnoticed (at least for myself), SEGGER has enabled some of the J-Link debug probes to support the CMSIS-DAP debug protocol.
This greatly enhances the use of J-Link debug probes for CMSIS-DAP based tools.
Continue readingWe all should know it: dynamic memory usage can be dangerous. There can be memory fragmentation, use-after-free, out-of-memory and memory leaks. While I do prefer static memory allocation for embedded systems, using a dynamic memory allocation in some applications is not avoidable or just makes sense.
In one of my lecture modules we develop a ‘Boulder’ game, where the player has to collect underground diamonds and avoid moving monsters:

I’ll show you have FreeRTOS memory usage can be tracked and monitored.
Continue readingModern MCUs like the NXP Kinetis have security features which prevent reverse engineering, but can ‘brick’ devices too. Depending on the settings, it prevents read-out from the FLASH or reprogramming the device. While some of the protection is (mostly) not by-passable by design, in many case the devices looks like ‘bricked’ but still can be recovered. In this article I’ll get you some ways for a (hopefully) successful recovery.

The NXP MCU-Link Pro debug probe includes a LPC804 as an additional microcontroller on the board, including its debug header.
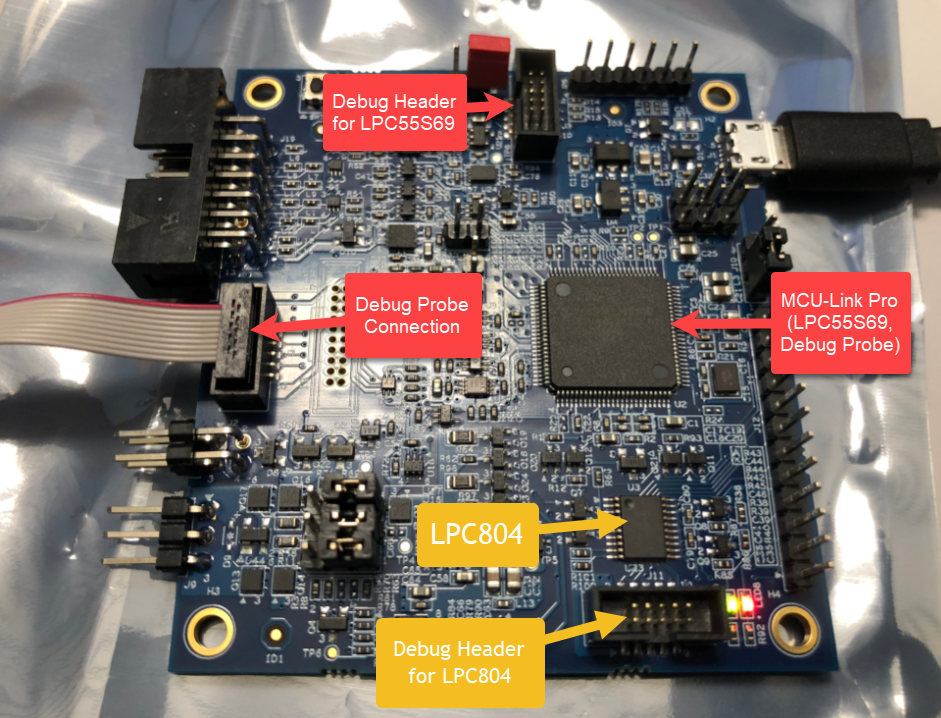
The question is: how to debug the on-board extra LPC804 microcontroller with an external debug probe?
Continue readingWhile developing applications, it can happen that things go wrong. And in my case I ended up with two LPC55Sxx EVK boards on my desk, which seemed not to be usable any more. The issue: the boards were not accessible with the debug probe, because right after main they muxed the pins in a wrong way :-(.

The standard GDB debug connections (both on-board and off-board) were not able to regain access of the board, because the MCU was running into the fault condition pretty much right out of reset.
Luckily, after a lot of trial-and-error, I have found a way to recover them.
Continue readingSplit-flap displays are electromechanical display devices, which were common in airports or railway stations a few years ago.Unfortunately, most of them are gone and replaced by LED displays. Why not create a DIY version of it?

After the release of the NXP MCU-Link debug probe, there have been hints in the Eclipse based MCUXpresso IDE that there must be another one coming. And indeed: another and more powerful debug probe is now available: the MCU-Link Pro. It is not only a debug probe but a power/energy measurement tool too, including an extra LPC804 mikrocontroller which can be used for all kind of things, like automation or scripting.

For me the Cortex-Debug Visual Studio extension by marus25 is the standard way to use VSC for embedded development. Another ‘standard’ piece I’m using in many of my projects is the SEGGER RTT.

This is a new article in my series about using Microsoft Visual Studio Code: After installation, project setup, building, debugging, setting up a kit, IntelliSense and FreeRTOS. This one is about setting up and using the xPack Extension to build cross-platform-multi-tool project with a project manager.

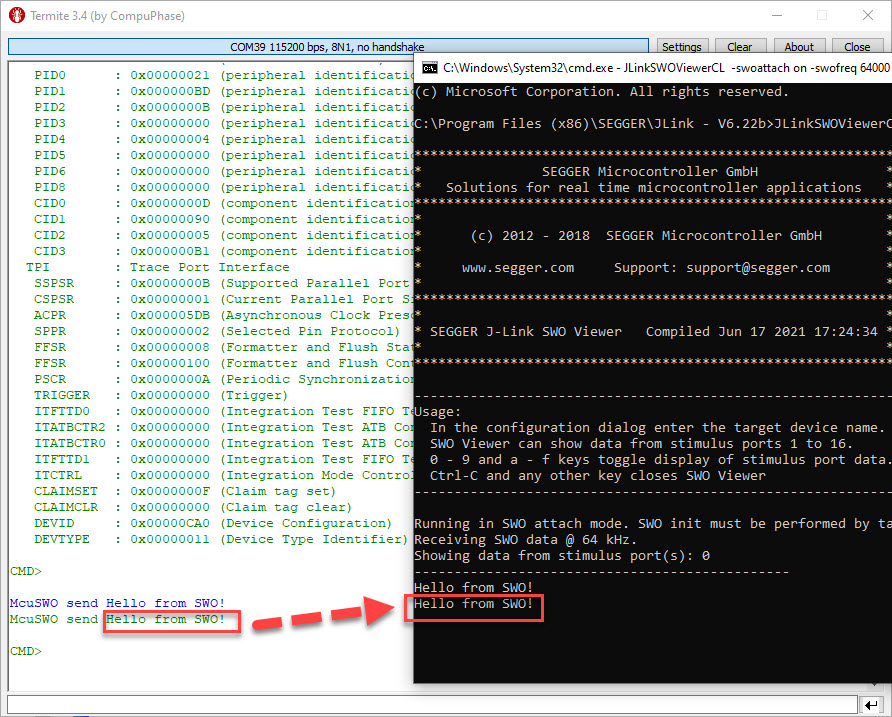
SWO (Single Wire Output) in ARM cores is probably one of the most under-used features. Which is surprising, because SWO can be very useful. In a nut shell: SWO is a single wire output pin/signal channel which can provide lots of different data, like PC sampling for coverage information, interrupt tracing data or ‘uart-like’ text packets.