From my previous MetaClockClock project, I still had some hardware available. So I decided to build my largest build so far: to clocks with 78 clocks each.


From my previous MetaClockClock project, I still had some hardware available. So I decided to build my largest build so far: to clocks with 78 clocks each.
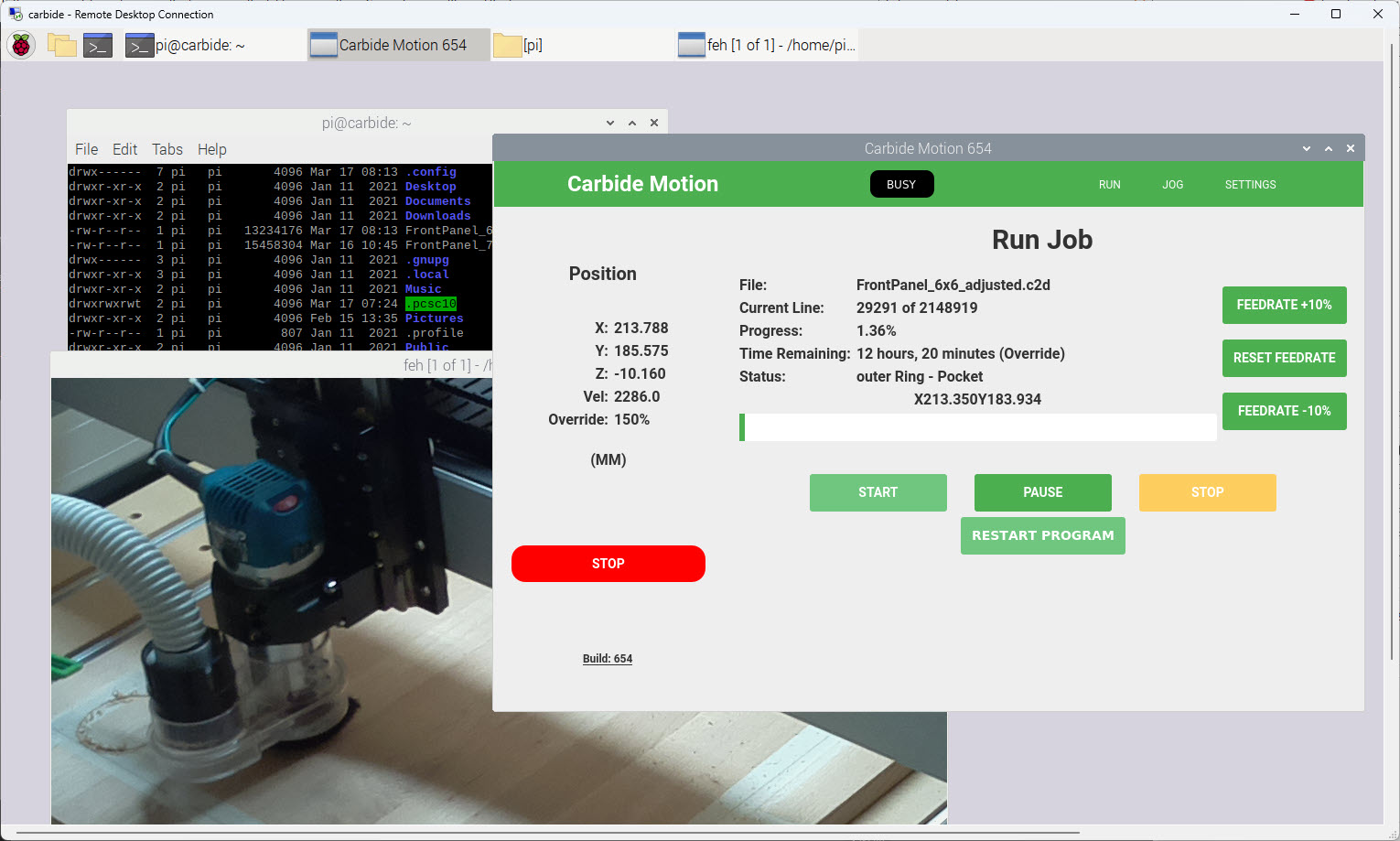
I have to run multiple +10h CNC jobs. So, I decided to upgrade my Shapeoko 4 CNC machine. I equipped it with a Raspberry Pi and a new dust collection system.
The 3D Printed Rugged Enclosure for NXP MCU-Link Debug Probe has been very useful. I wanted to design something similar for the ‘MCU-Link Pro‘ version of that debug probe. There there is already a laser-cut enclosure for the probe itself. I used the same stack-able rugged box for the debug probe plus all the cables.
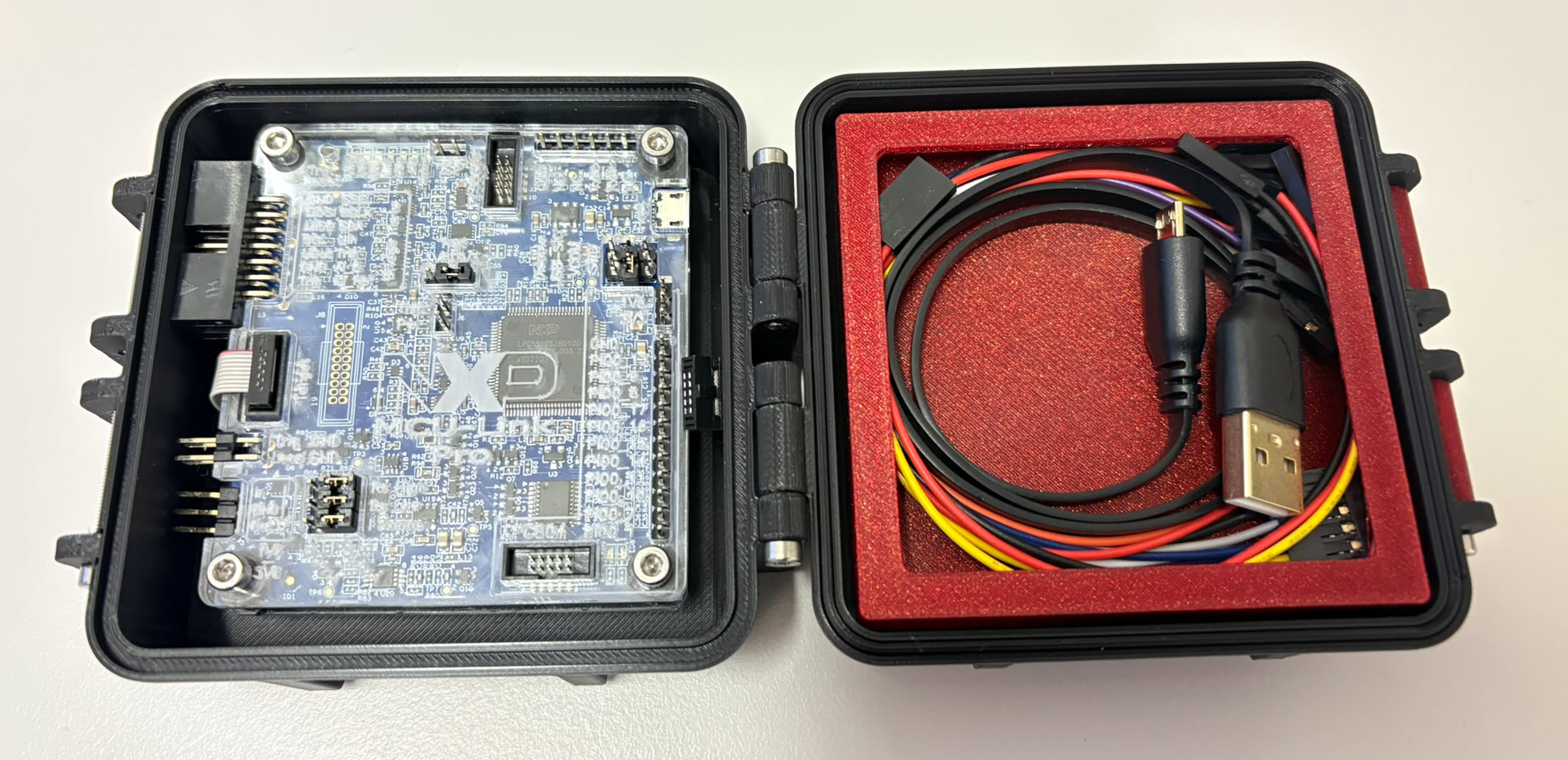
I’m using the NXP MCU-Link CMSIS-DAP debug probe in many of my projects. The debub probe from NXP does not come with an enclosure. I’m traveling to work by train, so I designed a new rugged box and enclosure. The box is small and I can keep all parts inside it.

It is the last day of November. And tomorrow the Advent starts with December 1st. Over the last weeks I have spent the weekends with building an Advent Calendar. This year it is one without any electronics. The CNC machine has cut a pine wood tree. And the 3D printer created round threaded and numbered containers, with a shiny star on top of the tree:

The MetaClockClock is a clock made of clocks. It consists of multiple dual-shaft stepper motors, arranged as a matrix of 5×12 analog clocks. Each clock has two motorized hands that can move independently. The clock can tell the time, but in a unconventional way. The entire matrix creates a meta-display that shows the time or other information. Between the updates, the hand can do coordinated, choreographed movements.

The clock hands are laser cut acrylics with get light up with a LED ring around the clock.
This article describes the build with CNC cut oak enclosure, laser-cut parts and 3D printed items.
Continue readingI’m making progress on my larger split-flap project (see Update on the Split-Flap Project for 2025). So far I have 32 operational for the larger 64 flap installation. In parallel, I worked on a smaller 4 flaps unit used as a clock.

Sometimes projects need more than a year from start to finish. And this project is even not finished yet. So here is a quick update of the enlarged Split-Flap project for 2025:
In case you are looking for an unusual business card, company badge or event badge holder, then this article is for you: A DIY RFID badge and business card with bling-bling addressable RGB LEDs to impress your customer, clients, friends at work or at a conference, packed with electronics. Plus it includes 10 original tools from Victorinox, the manufacturer of the Swiss Army Knife.

Who needs a debug probe, if you have printf()? If doing serious development, you most likely want a hardware debug probe. We at the HSLU IET use different hardware, boards and kits, and for many of the classroom equipment it is very useful to have the debug probe embedded on the target board: less cables, easier to use. For this we have developed a new Open Source Hardware (OSHW) debug probe in KiCad which can used in different ways: as external debug probe, integrated and soldered on top of the target board, or fully integrated and embedded into a custom design.

