In an earlier article I explained how to generate GNU coverage information, for an embedded application written in C.
In this article, I show the steps and configuration needed to use GNU gcov targeting an embedded application with C++.


In an earlier article I explained how to generate GNU coverage information, for an embedded application written in C.
In this article, I show the steps and configuration needed to use GNU gcov targeting an embedded application with C++.
The GNU Coverage (gcov) is a source code analysis tool, and is a standard utility in the GNU gcc suite. It works great in a hosted environment (e.g. Linux or Windows), where you have plenty of resources and a file system. But the gcov tools is relevant and usable for restricted embedded systems too. I have used it for years with the help of debug probes and file I/O semihosting. But semihosting does not come for free, depends on a library with support for constructors and destructors, plus relies on file I/O.
Fortunately, there is a way to use gcov without debugger, semihosting, file I/O and special system initialization: using a freestanding environment:

This article explains how to collect coverage information using a data stream for example over UART or USB-CDC. Key benefits are less code side, no need for a debugger or on-target file system, improved performance, better automation and flexible data collection.
Continue readingEurope is currently facing an ‘Energy Crisis,’ and ‘Sustainability’ is a popular topic among companies. However, embedded engineers go beyond talking—they take action and make tangible changes in the world. With the increasing use of electronic devices, minimizing their energy and power consumption is crucial. Optimizing systems for deep low power or deep low energy is a challenging task. Nonetheless, as I will demonstrate in this article, it is possible to reduce energy consumption by a factor of 100 or more. This article provides a brief overview of the foundational concepts and then applies them step-by-step to an ARM Cortex microcontroller.
Eclipse includes many ways to build a project. One of it is the built-in builder which makes it super easy. And for more complex building needs I can use an external make (see Tutorial: Makefile Projects with Eclipse) or cmake or combination of multiple ways (see Building a Triumvirate: From Eclipse CDT to CMake, CMD and Visual Studio Code).
There is yet another use case how to easily tweak the build process in Eclipse: using a script file in the project to be used as the ‘compiler’:
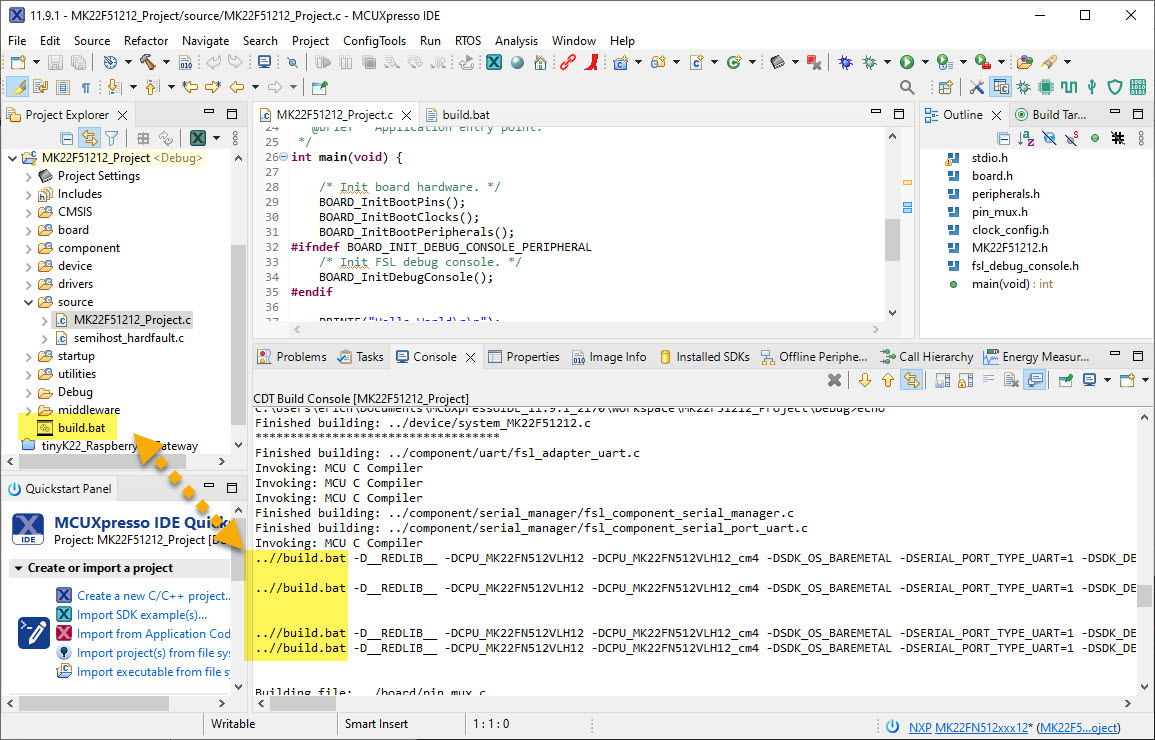
That way I can do all kind of custom steps (analysis, re-formatting, static checkers, …) for each file compiled.
Continue readingFloat and double data types area a bad choice for embedded applications. At least in most applications, and can or should be avoided, even with hardware FPU support present.
But how can I be sure that no floating point operations are used?

This article describes how to configure the GNU toolchain, so that no float or double operations are used, with the example of ARM Cortex-M. What I do? ‘Poisoning’ (!!!) the source code, force the gcc compiler to use software floating point operations and then catch them with the GNU linker :-).
Continue readingMany cost-sensitive ARM Cortex-M devices like the M0+ do not have a hardware floating point unit, and some like the M4 only has an optional single-precision floating point unit (FPU). As outlined in “Be aware: Floating Point Operations on ARM Cortex-M4F“, using floating point operations without a hardware unit can be costly.
Looking at the disassembly for sure will tell you if the hardware is handling the float or double operation or not:

But who wants check the all the disassembly? With the GNU tools there is an easier way: readelf.
Continue readingThe ‘Verkehrshaus der Schweiz‘, the ‘Swiss Museum of Transport’ is Switzerland’s most popular museum.
In April 2023, it opened up a new building and the ‘Experience Energy!’ exhibition. For the opening event we created a unique construction kit to explore energy: from harvesting to storing and up to distributing and using energy.

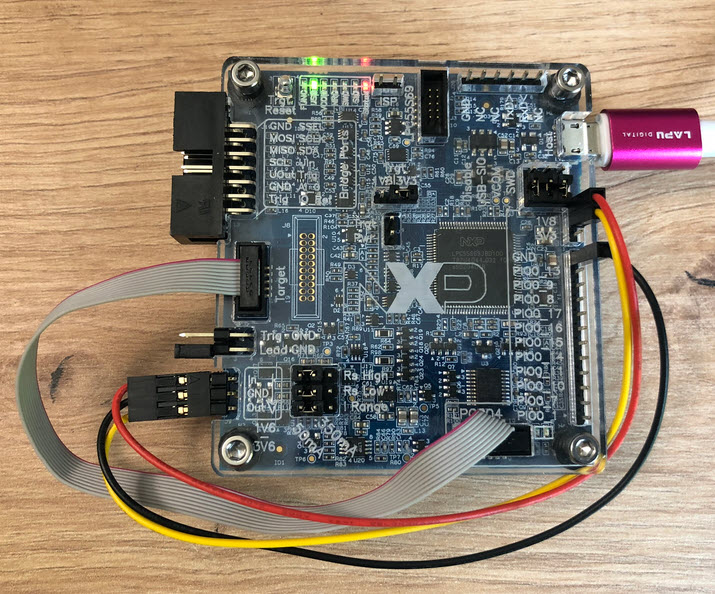
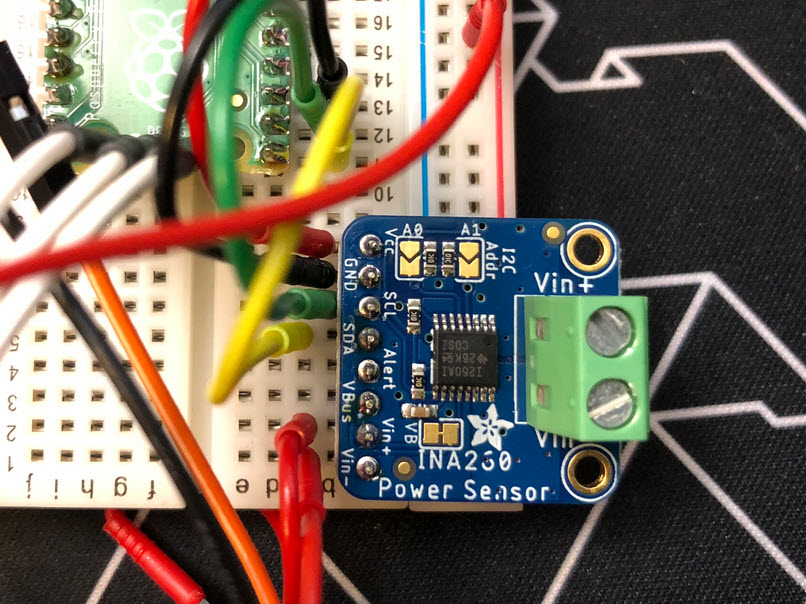
For a research project and demonstrator at HSLU university I have to measure voltage a DC voltage and current. For this I’m planning to use the Texas Instrument Texas Instruments INA260, so I had to quickly develop a software driver for it.
The new year 2024 is coming, so time to close the current year with a new release: I’m pleased to announce a new release of the Processor Expert components, available on SourceForge and GitHub.

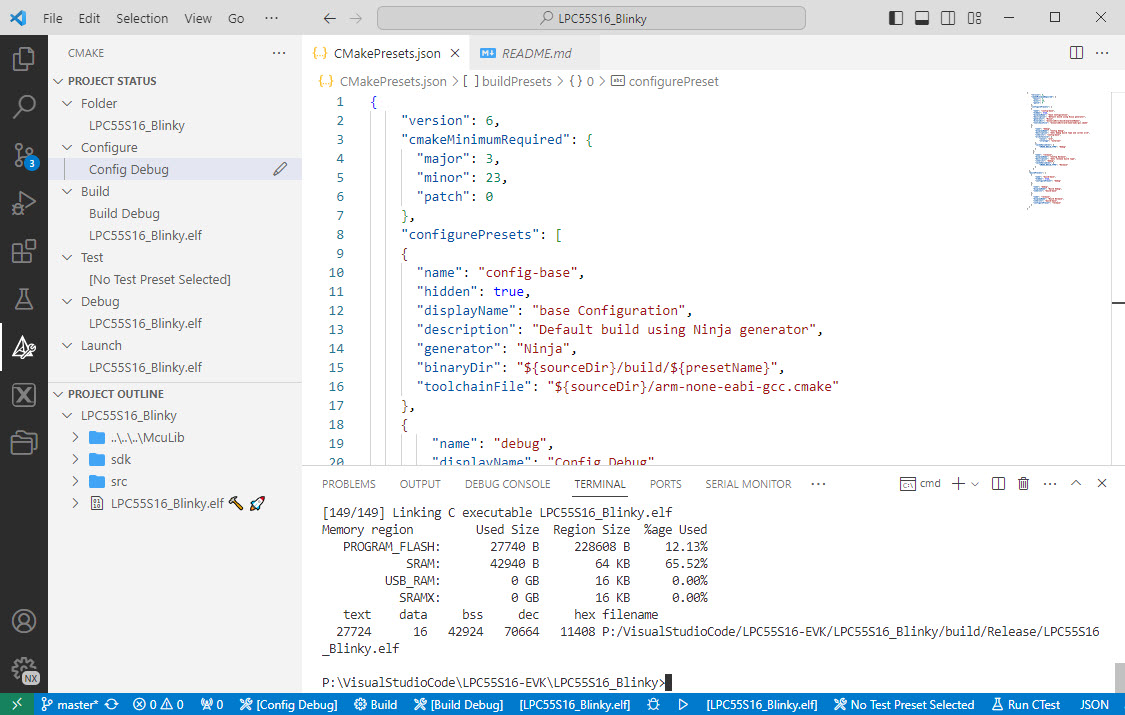
I’m getting my head more and more around CMake and its features. After having so many issues with VS Code dealing with CMake Kits, I have found feature in CMake which really is a game changer for me: CMake Presets.