“If you are in a hurry, go slowly.”
– Konfuzius
Konfuzius, I hear you. But so hard to follow that advice. Simply too much going on right now. But I’ll give it a try….

“If you are in a hurry, go slowly.”
– Konfuzius
Konfuzius, I hear you. But so hard to follow that advice. Simply too much going on right now. But I’ll give it a try….
When I left for the week-end, I missed to take with me my Segger J-Link debug box. I have one P&E Universal Multilink at home, but I needed a Segger J-Link to use the SystemViewer with my robot. I need that for a FreeRTOS trainig I will deliver in Poing/Germany on Monday at Avnet/Silica.
But I had a Freescale KwikStk board at home, and I did remember that I can use that board as a Segger J-Link to debug my custom hardware (see “Freescale Kinetis KwikStik (part 1)“).
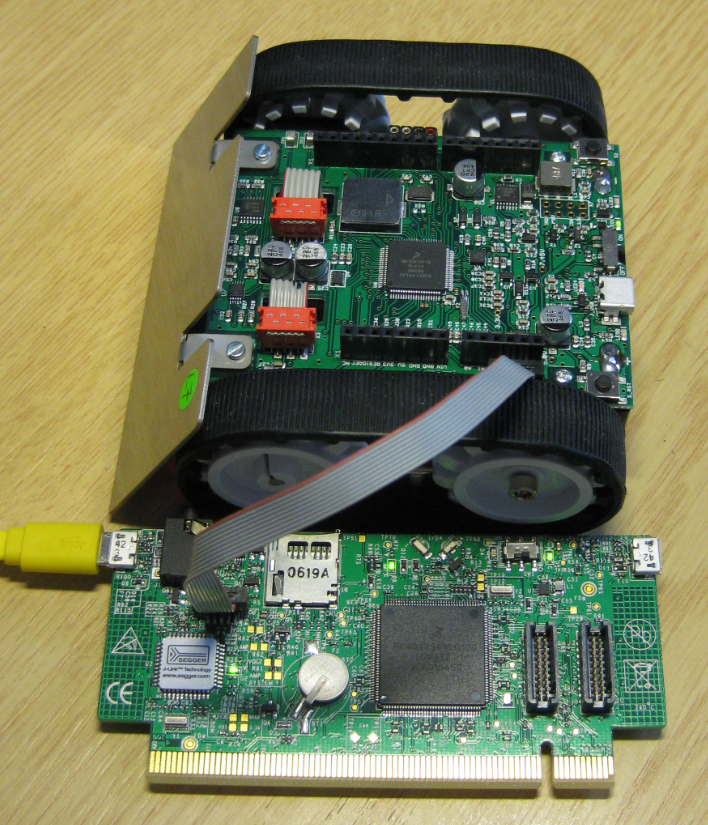
Debugging Custom Board with KwikStik
It it is obvious that a new trend from the US is swapping over to Europe and probably the rest of the world: Black Friday. That is the day yesterday following Thanksgiving day in the United States. It is a ‘shopping’ day. Consequently, the stores are battling with huge discounts. And I use that to fill up my inventory for the Christmas-time projects 🙂 What caught my attention yesterday Friday was this: a Raspberry Pi Zero for US$5!!!!
Raspberry Pi Zero (Picture: Adafruit)
It’s not Christmas yet, but: For a research project I’m currently evaluating a new microcontroller where I need a bit more leg room. Right on time I saw that there is a new board available which caught my interest: The Freescale FRDM-K82F :-). Without thinking too much about it, I have ordered that board from Mouser Thursday last week and I had it in my hand today 🙂 Time to put up a quick post about it:

New Box on the table
In case there are problems with the C/C++ preprocessor, it is useful to generate the compiler preprocessor listing. Here is how to create a preprocessor listing with GNU gcc compiler and the GNU ARM Eclipse plugins in Eclipse:

Preprocessor Listing in Eclipse
A lot of good things happened in the last three weeks, so here is a new updated McuOnEclipse component release, with the following main improvements:

First off: The tinyK20 project is progressing fine and is now on Hackaday.io :-).
For a research project we would like to use the tinyK20 to log gyro sensor data. For this I have created a quick-n-dirty project to explore how feasible it is. The tinyK20 has all the pins on the outside of the board, so I’m able to put it on a bread board:

tinyK20 on Breadboard
During the night we received the first snow for this winter. The sun was breaking through the clouds in the afternoon, and it happened that I was near Brunnen to take of the Wylen chapel with the snow-covered Mythen in the background:

Kapelle Wylen
Readers of my blog know: I’m not a fan of printf(), and I think for many good reasons. Still printf() is widely used, and the GNU gcc tries to optimize things. This is observed with a simple example: If I’m writing
printf("a");
Then the code produced (ARM Cortex-M0+ with GNU ARM Embedded 4.9 2015q2 gives:
movs r0, #97 ; 0x61 bl 0xa98
Instead of calling printf(), it is calling putchar()! Why is that?

PutChar instead of Printf
One day earlier than expected, our tinyK20 boards arrived, and they are looking great :-):

Four tinyK20 Boards
