COVID-19 is by far not over, and in Switzerland the infection rate is going up again (2nd wave?). During the spring 2020 semester university lock-down we moved pretty much everything to a ‘distance learning’ setup. With that experience and with the request to prepare for the fall semester, I have constructed a DIY conference and teaching device which should make things simpler and easier: a combination of video camera, speaker phone and a muting device:
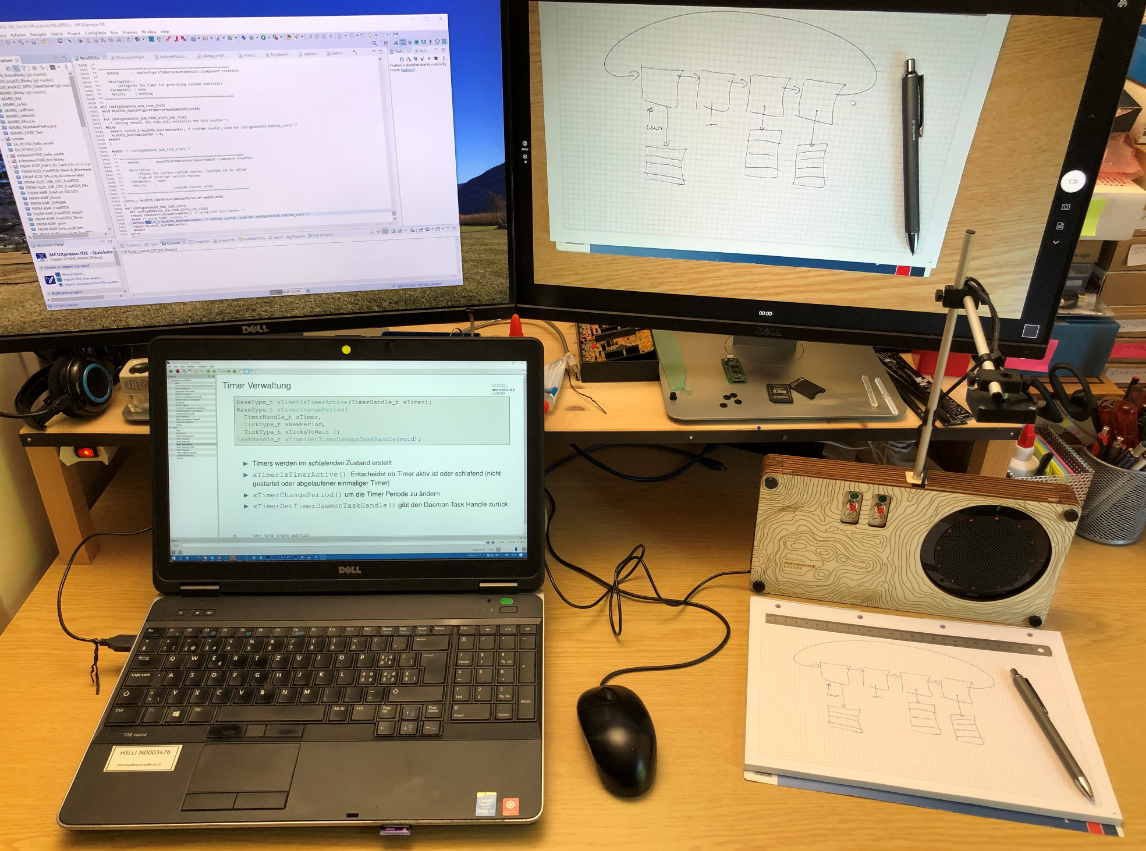
Desk with Communicator C2020