The last challenge of the robotics course of this Fall semester had to be something special: This time it was about a ‘beauty contest’ followed by a line following challenge. Motto: Merry Christmas Time!

The last challenge of the robotics course of this Fall semester had to be something special: This time it was about a ‘beauty contest’ followed by a line following challenge. Motto: Merry Christmas Time!
Sumo robot challenges are fun. One important aspect of every Sumo robot are the tires: if they are sticky enough, the robot can push out the opponent. In this article I compare different available robot hubs and tires, and how to make DIY hubs and tires.

Selection of Sumo Robot Wheels and Tires
Doing Mini Sumo robot competition is really fun, and there is yet another one coming to end the current university semester. For several years we have used our own sumo robot, and this is the one used in the course this year too. But for future and extended events we are exploring a new robot. I proudly present the concept of the next generation sumo robot for the year 2018:

Sumo Robot with Bluetooth module
The spring university semester is coming to an end, and the Infotronic course closed with a Sumo robot challenge. Great challenge, new technologies, innovative approaches and funny designs 🙂

Groot
ToF (Time-of-Flight, see “Tutorial: STMicroelectronics VL6180X Time-of-Flight LIDAR Sensor“) sensors are fun: they measure the time the light takes to travel to an object and back again. That way they can measure the distance to object with a millimeter accuracy. An ideal sensor for a battle robot: 🙂

Front Blade attached
We are using robots to teach advanced embedded system programming at the Lucerne University (see “Sumo Robot Competition“). Students can buy the kit, and we are running out of available hardware. Time to produce a new series of robots :-). It took us a while to get to the next revision of the Zumo Robot, but finally the first one has been produced and assembled, and I think it is looking good :-).

Intro_Zumo_Robot
The Infotronic (INTRO) Spring 2015 course finished at the Lucerne University of Applied Sciences and Arts with a Sumo Robot competition with great and funny robots:

Set of Sumo Robots
Students worked hard implementing their robots for the coming Sumo battles. Amazing looking Sumo Robots are the result :-). Have a look yourself:
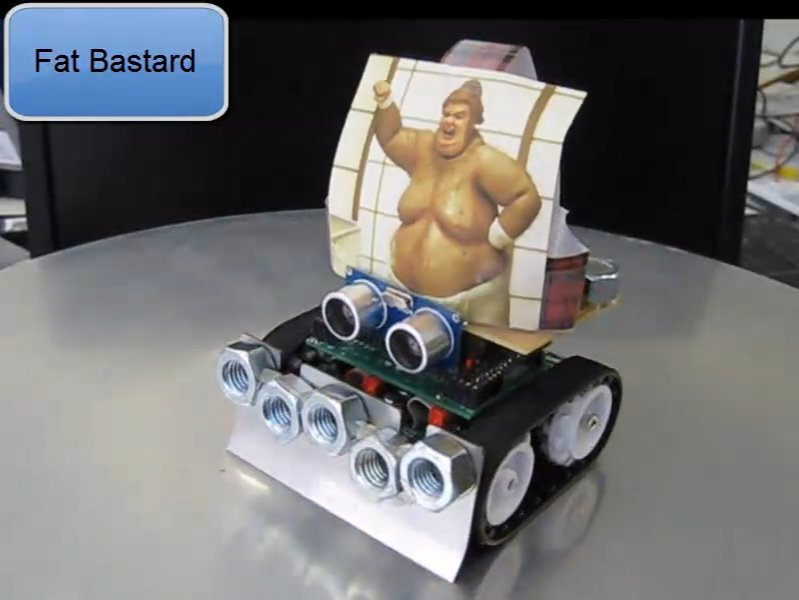
Fat Bastard
Happy Sumoing 🙂
Finally, winter with lots of snow arrived in Switzerland. Getting up at 5am this morning to free up my front yard from the 25 cm snow which came down overnight, so I can drive my wife to work. She does not like driving in snow conditions, but it is fun for me :-). But lots of snow, I thought I could use a little helper bot:

Snow Plowing Sumo Bot
As I have received multiple questions about that Darth Vader Santa Claus/Christmas robot in the Mini-Sumo competition last week, here are the details in case you want to build your own :-)…

Darth Vader Sumo Bot
