
The spring university semester is coming to an end, and the Infotronic course closed with a Sumo robot challenge. Great challenge, new technologies, innovative approaches and funny designs 🙂

Groot
Each student had a robot kit based on Pololu motors and chassis. with our custom NXP Kinetis K22FX512 board (see “Zumo Robot with WiFi and GPS“) available. The kit included four STM VL6180X ToF sensors (see “Tutorial: STMicroelectronics VL6180X Time-of-Flight LIDAR Sensor” with range scaling up to 60 cm distance, with the optional 3D printed parts (see “3D Printed Sumo ToF Blade“). As a change from of the normal Sumo rules, the robots are started with a remote controller (see “Enclosure for the Remote Robot Controller with LCD Display“).
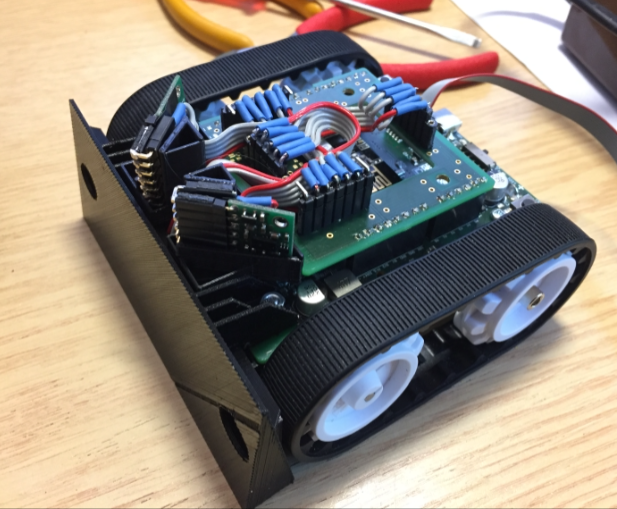
Modified Zumo Robot with 4 ToF Front Sensors and 3D printed blade
Walls around the Sumo Dohyo prevented the robots to fall off the table:
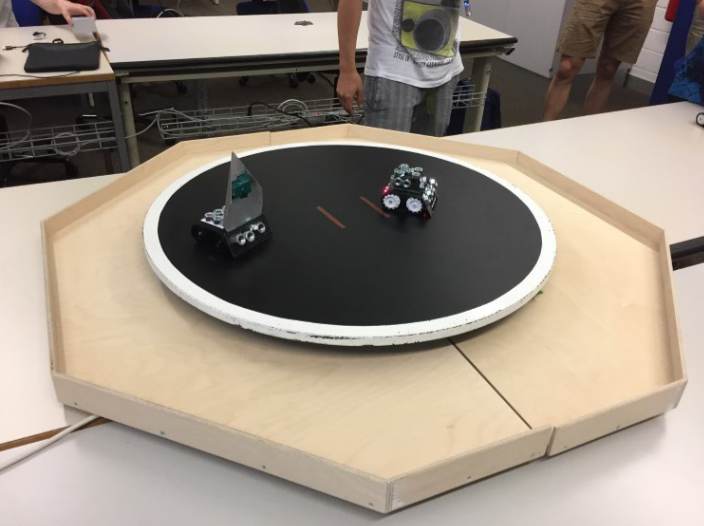
Walled Sumo Area
Have a look at the following videos.
Robot portraits:
The Sumo battles:
The ranking is on Challonge.
Here are a few learnings for the next students (or for your own Sumo challenge):
- The ToF sensors do not work well on black surface
- Instead turning around and search the opponent, it is better to search while moving
- Blade extensions or dropping blades are an advantage
- 3D printed plastic plates can stand against the metal blades
- To avoid detection by ToF sensors, use black tape and keep your profile as low as possible
- Mirrors did not work as well as expected against ToF sensors, as they very much depend on the angle
- Random drive and turn alone is a good strategy
- Weight and grip is important
- Be ready to change a damaged/burned DC motor during the challenge
Happy Sumoing 🙂

What fun. Thanks for the videos.
LikeLike
Pingback: Christmas Tree Robot Challenge | MCU on Eclipse