As you might have read it already: for the new semester we plan the next generation of Sumo Robots: still based on the Pololu Zumo Chassis, but instead using the FRDM board with the processor, we directly put a Kinetis K20 processor on the board :-).
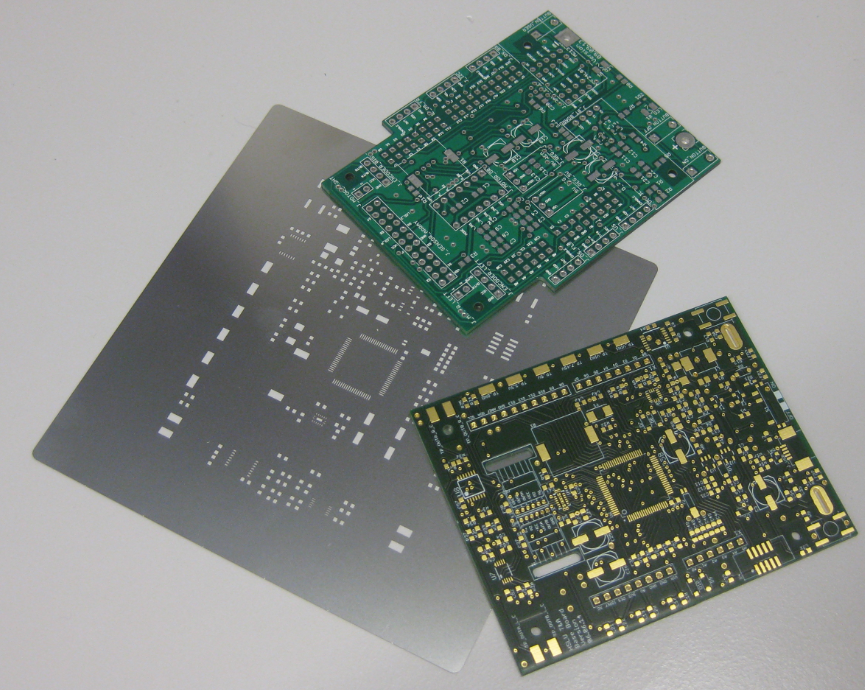
Old (top) and new (bottom) PCB with solder mask
This is already the V3 of the robot:
- V0 based on the original Pololu parts, but with FRDM-KL25Z, see “The Freedom Zumo Robot“
- V1 based on home-made PCB with quadrature encoders, see “Adding Quadrature Encoder to the Zumo Chassis“
- V2 with externally produced PCB (2-layer), see “Zumo Robot assembled“.
- Now V3 comes with processor embedded 🙂
Major features of the new design:
- Powerful Freescale Kinetis K20 with 120 MHz (ARM Cortex-M4F)
- Quadrature Encoders with processing logic on board (see “Processing the Pololu Motor Shaft Encoders“)
- Improved and simplified supply voltage circuits with more capacitance to avoid voltage drops
- 4-Layer PCB, with SMD parts to be populated outside (so students do not need to populate all the SMD parts any more 🙂 )
- Overall reduced costs (-20%) due higher integration (no external encoders, no external analog encoder processing, most connectors removed.
That way the bots are more compact, as all the wireless communication parts (nRF24L01+, Bluetooth) and sensors (ultrasonic, infrared distance sensors, …) can be on an auxiliary Arduino shield).
The first batch of boards we will populate ourselves, and for this we have received a laser-cut soldering mask:
Solder Mask on PCB
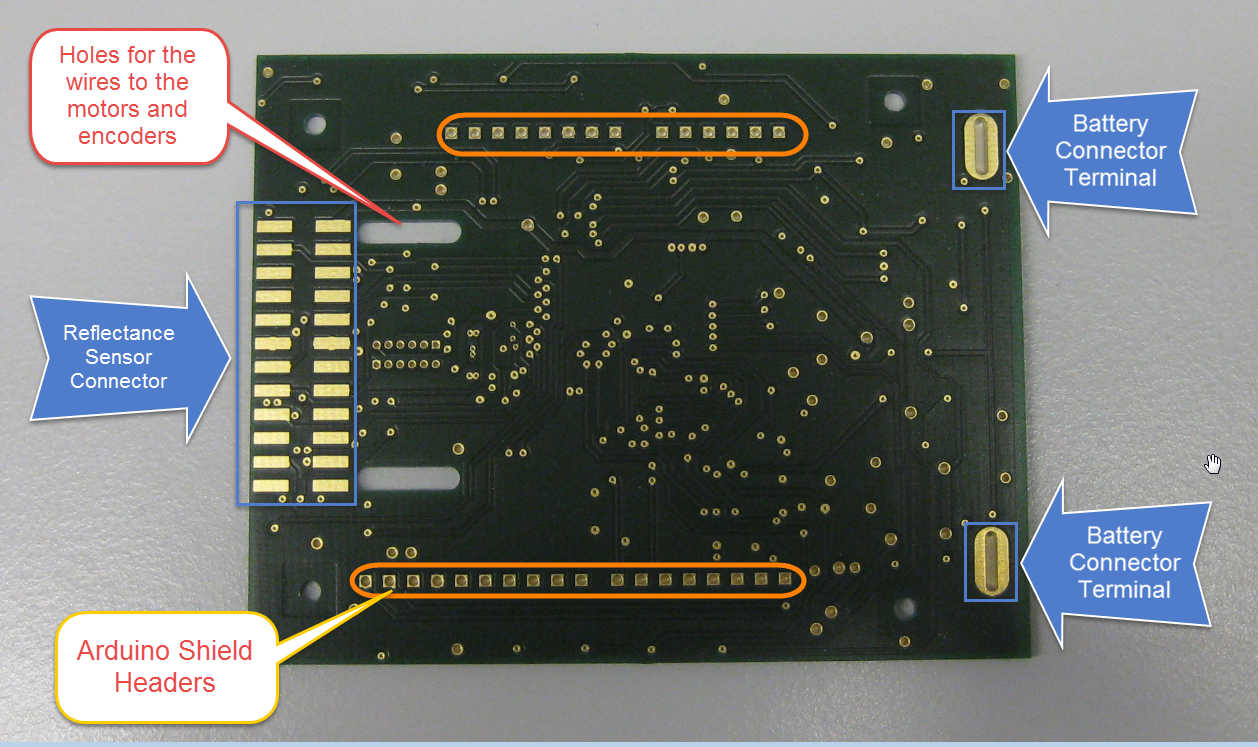
Robot Bottom Side
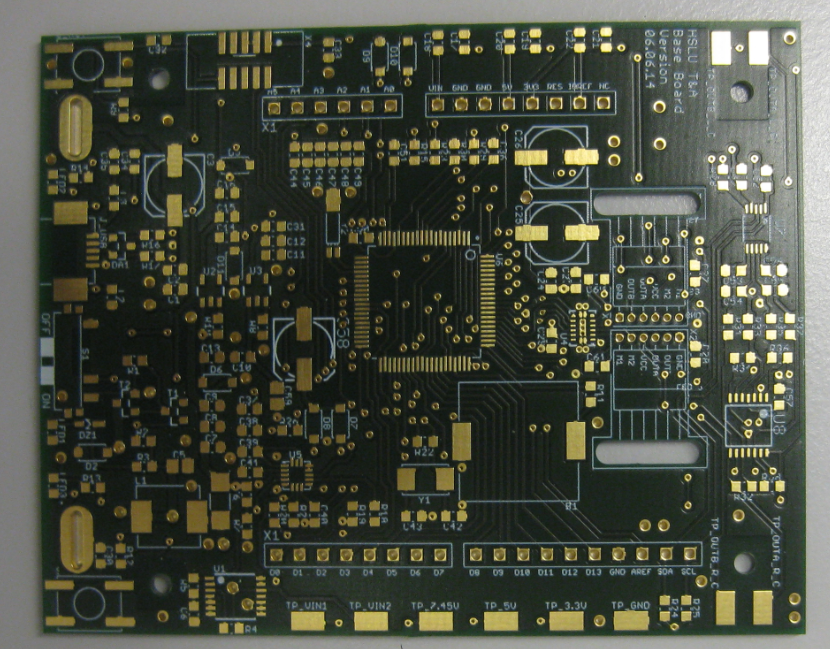
Robot Board Top Side
So we will build the first robot, and if successful, we will be ready to build around 40 externally. That will be fun 🙂
Happy Roboting 🙂

I think you do great work!
-Bill
LikeLike
For programming this board?
LikeLike
Nice ! Where did you get the PCB’s made ? Did you go to 4 layers to minimise noise etc, or just to make trace routing easier ?
LikeLike
We made the PCB with http://www.pcb-pool.com and the reason for four layers make trace routing much easier. Having better noise characteristics was a plus.
However, we faced a problem that for strange reasons PCB-Pool only was able to populate boards if they are dual layer. For four-layer boards they forced us to use another (external) supplier for this (through PCB-Pool) which blow our costs out of the initial estimates. And this delayed the new board delivery too, so expecting it in 2-3 weeks from now.
LikeLike
Pingback: Zumo Robot with Magnetic Encoders | MCU on Eclipse
I would like to build my own Zumo using a STM32F4. I’ve never done anything like this before, and i’m hoping i can heavily leverage off the original schematic. Can I get access to the schematics you put together for your board?
LikeLike
If you never done something like that, than I wish you good luck!
You can can use the Pololu schematics as a base (this is exactly what we did), see https://www.pololu.com/file/0J779/zumo-shield-v1_2-schematic.pdf
LikeLike