This week we were busy with building and documenting the first robots based on the Zumo Robot Chassis PCB.
Chassis Base PCB
The chassis is designed to hook up the FRDM-KL25Z board from Freescale. It is using parts from Pololu (chassis, motors, DC-DC converter, line sensor, H-Bridge, encoders):
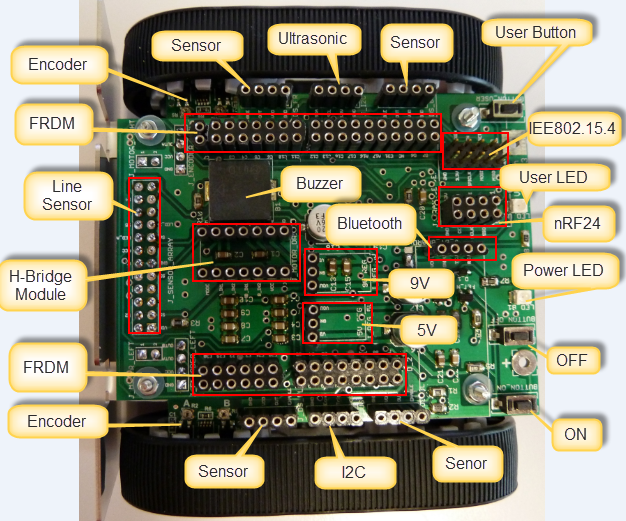
Zumo Base Board Overview
Power
The robot is powered from 4 AA batteries in the battery compartment below the base PCB. Battery weight is not a concern as Mini Sumo Robots can be up to 500g, and the robot with 4 NiMH AA batteries only has 330g.
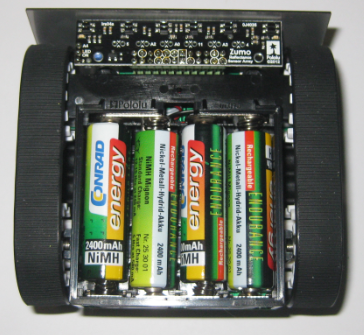
Battery Compartment
One push button is to turn power on, and another to turn it off:
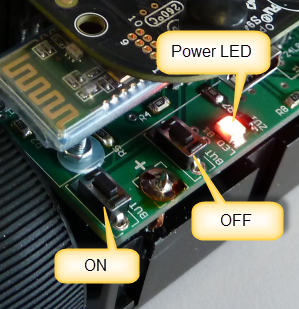
On, Off, and Power LED
Details about how it works are in the Robot Schematic Presentation PDF.
Optical Sensor
Behind the front blade, there is a IR reflectance sensor array with 6 IR sensors:

Zumo Reflectance Array mounted
It uses the Pololu Zumo reflectance sensor array, but with extended (longer) header pins, as the base board is more off the ground:
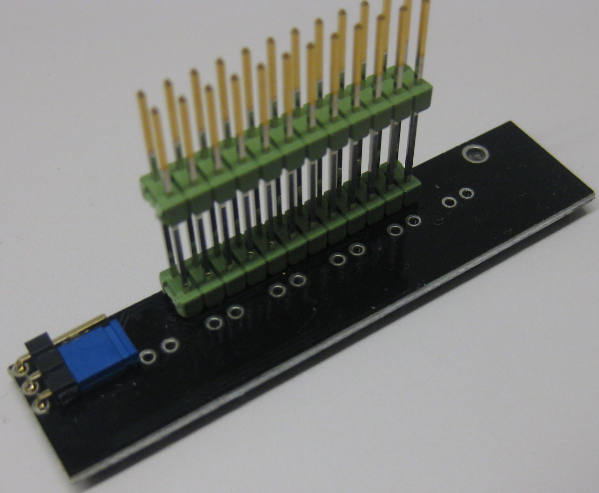
Line Sensor with Header
FRDM-KL25Z
The next picture shows sensors attached with a HC-06 Bluetooth and nRF24L01+ module:
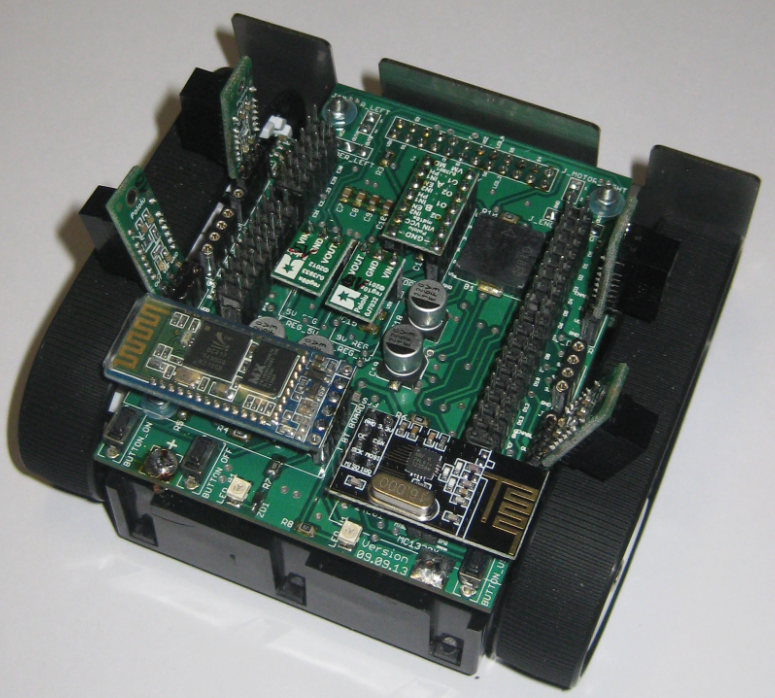
Zumo with modules mounted
The FRDM-KL25Z board gets mounted on top of base board, and sensors connected on the sides:

Intro Zumo Robot with FRDM-KL25Z
So far, all components are working. Only the adapter PCB for the IEEE802.15.4/SMAC module is not ready yet.
Happy Roboting 🙂

Pingback: Compiling Documentation and Presentations: LaTeX | MCU on Eclipse
Pingback: FRDM Board Bootloader fails with Windows 8.1 Preview | MCU on Eclipse
Pingback: Sumo Robot Battle Tips | MCU on Eclipse
Pingback: IEEE802.15.4 for the Zumo Robot | MCU on Eclipse
Pingback: New Zumo Robot PCB’s Arrived! | MCU on Eclipse
Pingback: Zumo Robot with WiFi and GPS | MCU on Eclipse
Good day, please send me the code used in programming the robot zumo this page, I’m going crazy and I can not make it work.
Already Thankful
Cris
LikeLike
Hi Cris,
So do you have that robot hardware built yourself? Without that hardware, it is no value for you just to send the code?
And there is already code on GitHub: https://github.com/ErichStyger/mcuoneclipse/tree/master/Examples
Erich
LikeLike
Pingback: Zumo Robots at Maker Faire in Rome (16. – 18. Oct. 2015) | MCU on Eclipse