
Rigi Schwinget (Picture: Roman Koch)
Every three years, there is the “Eidgenössisches Schwing- und Älplerfest” in Switzerland. A really big thing for us here. If you are not familiar with what this is, then have a read about the long tradition of Schwingen in Switzerland.
Wondering what “Schwingen” or wrestling has to do with a technology blog? It is about having fun with robots!
Sumo Robot Wrestling
Yes, there is such a thing like robot wrestling :-). It is inspired by the Japanese Sumo Sport. As Schwingen is very popoluar in Switzerland, so is Sumo in Japan.

Sumo (Picture: Eckhard Pecher)
In a Sumo round, the goal is to push the opponent outside of the circular ring. Or have him to touch the ground with anything other than the soles of the feet.
Sumo Robot Competition
In Robot Sumo the goal is similar: to push the other robot outside of the circular ring. The robot which touches first the outside of the ring looses the round. The robot which looses first two rounds, looses the fight.

Sumo Robot Fight
A good description and set of rules for Sumo Robot Competitions are here.
An excellent illustrated introduction about the Sumo Robot rules is found at http://www.robotroom.com/SumoRules.html:
“Sumo robot contests feature two robots trying to push each other out of a ring. The competitions are non-destructive, family friendly, and great learning experiences.”
In my next lecture, I plan to have students to build and compete with their own Sumo robots. I have successfully built multiple robots using the Pololu Zumo chassis:
- The Freedom Zumo Robot
- Zumo Line Following with the FRDM-KL25Z
- Adding Quadrature Encoder to the Zumo Chassis
The robot qualifies for the ‘Mini’ Sumo Robot class (10 cm x 10 cm size, 500 g). The Sumo Ring (Dohyo) for this class is 77 cm with a white border on a black ground:
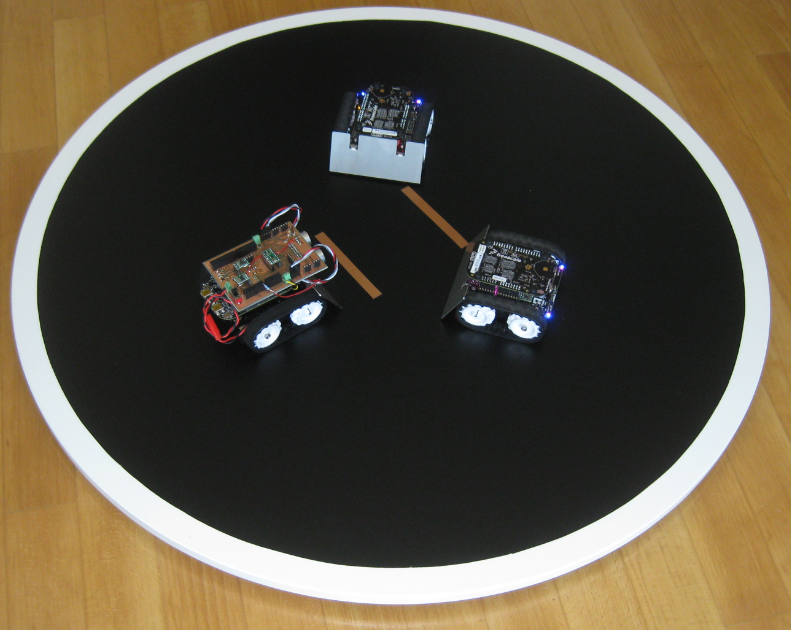
Three Robots inside the Dohyo
The robots firmware is for now very basic, with the following features:
- Command line and shell interface
- Auto calibration (placing robot over white/black boundary, pressing button for 3 seconds and it will calibrate the values)
- Implemented the ‘5 seconds delay’ rule: after pressing the start button, the robot waits 5 seconds
- The accelerometer of the FRDM-KL25Z is used to decide if the robot has fallen out of the ring, or is taken by the operator. In that case, the robot stops the motors.
A video is probably the best way to show how this works:
I need to work on the implementation and details, but so far things are progressing nicely, and using the robots is a lot of fun 🙂
What else is on the plan?
- Adding mores sensors to detect the opponent
- Fine tuning of border detection
- Higher speed
- Using another FRDM boards
- Adding wireless communication (IEEE802.15.4, Bluetooth and nRF24)
Happy Sumoing 🙂

Broken video link 😦
LikeLike
The video link works for me? Can you try again?
And the link to it on Youtube is http://www.youtube.com/watch?v=ndlQtkUD7c4
LikeLike
Pingback: Mini Sumo Robot with Proximity Sensors | MCU on Eclipse
Pingback: Zumo Robot Chassis PCB arrived! | MCU on Eclipse
Pingback: Zumo Robot assembled | MCU on Eclipse
Pingback: DIY Free Toolchain for Kinetis: Part 7 – GNU ARM Eclipse Plugins | MCU on Eclipse
Would love to have one of the intro zumo pcb’s
LikeLike
Hi Rick,
students have built 20 robots based on that PCB: https://mcuoneclipse.com/2013/10/06/zumo-robot-assembled/
PCB files are available here:
https://github.com/ErichStyger/mcuoneclipse/tree/master/Eagle/INTRO-Robot
LikeLike
Pingback: Rise of the Machines: Arduino Bots | Pentura Labs's Blog