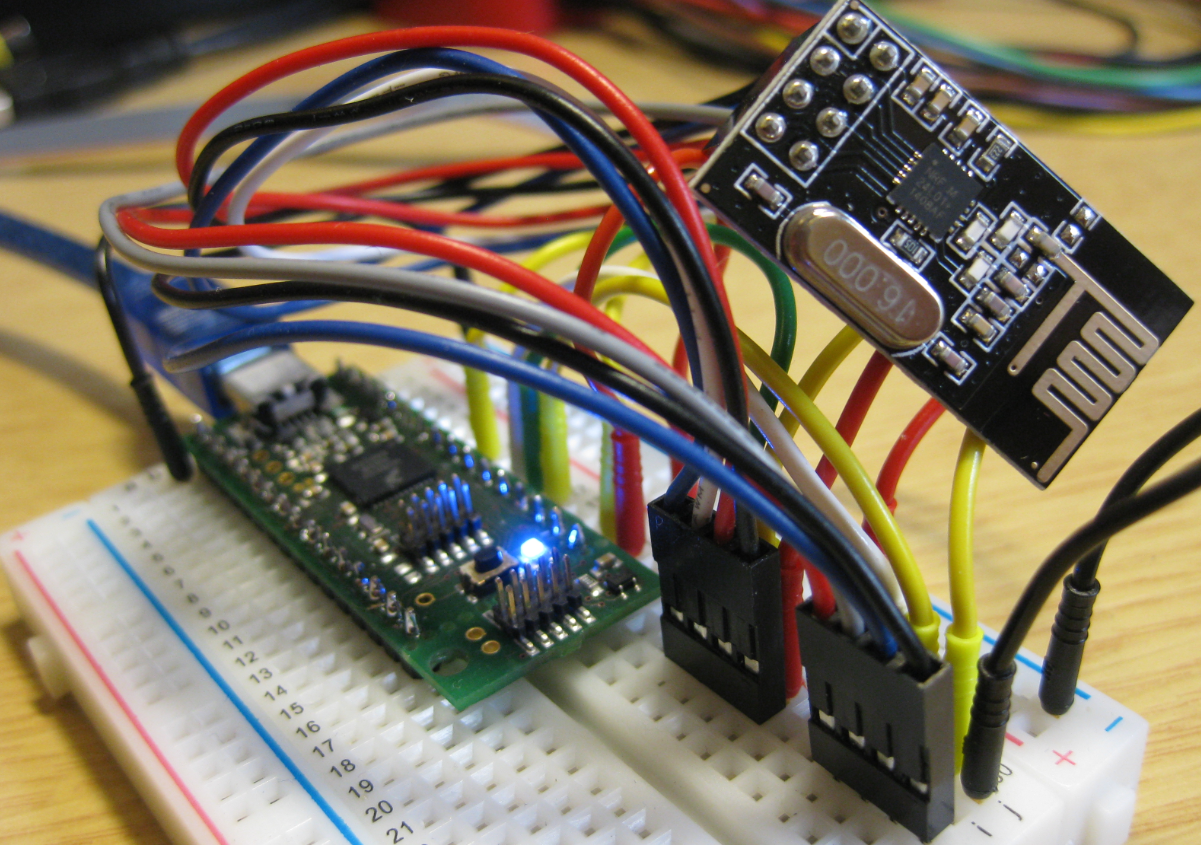
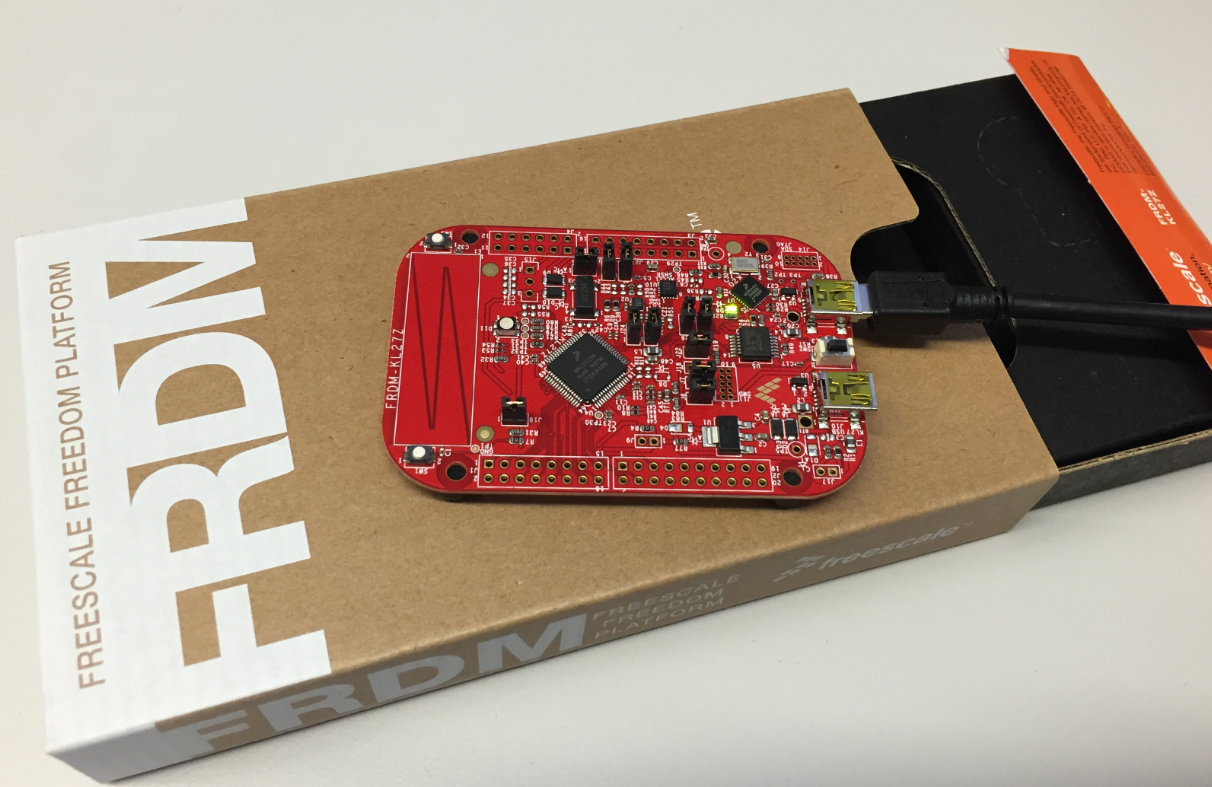
As a remote controller for the Sumo robot (see “Zumo Robot with Magnetic Encoders“) we have used so far a combination of NXP FRDM-KL25Z board and a Joystick Shield (see “Joystick Shield with nRF24L01 driving a Zumo Robot“). That solution was not ideal, so this weekend I created a 3D printed prototype:
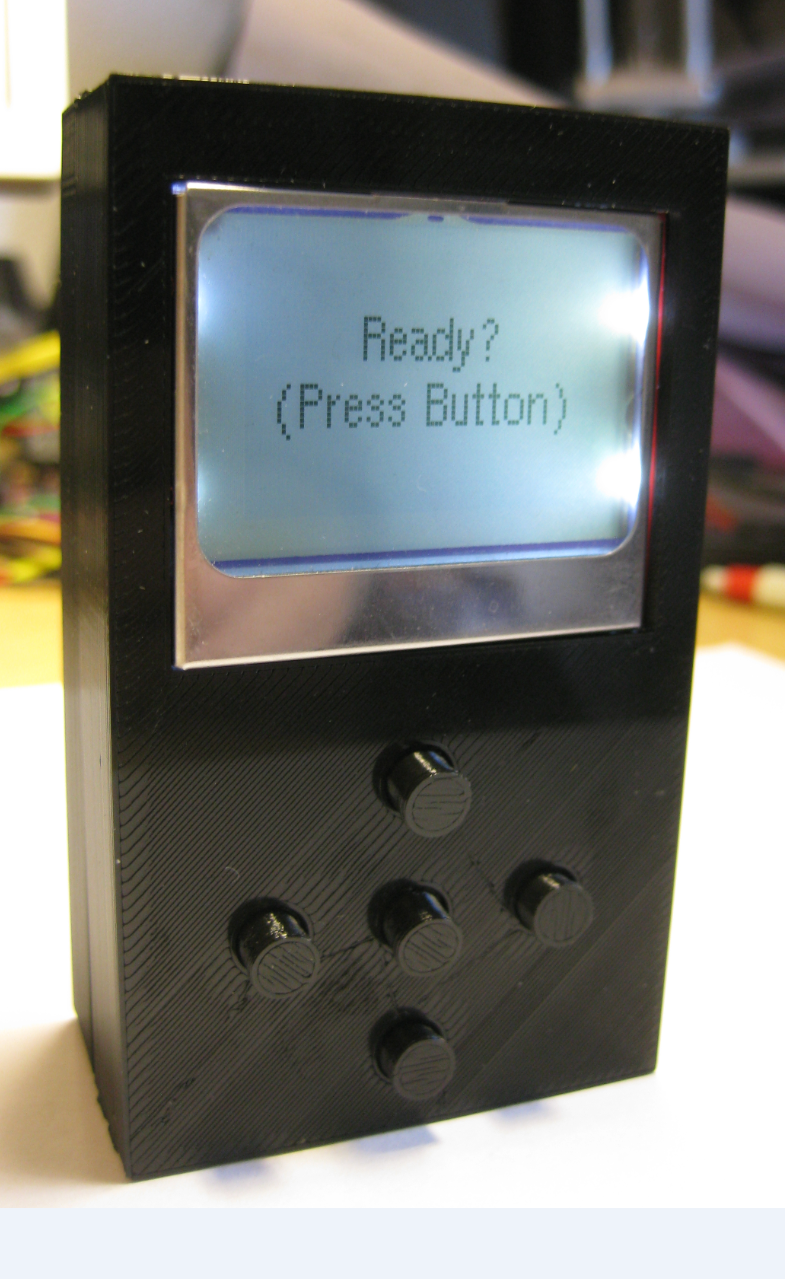
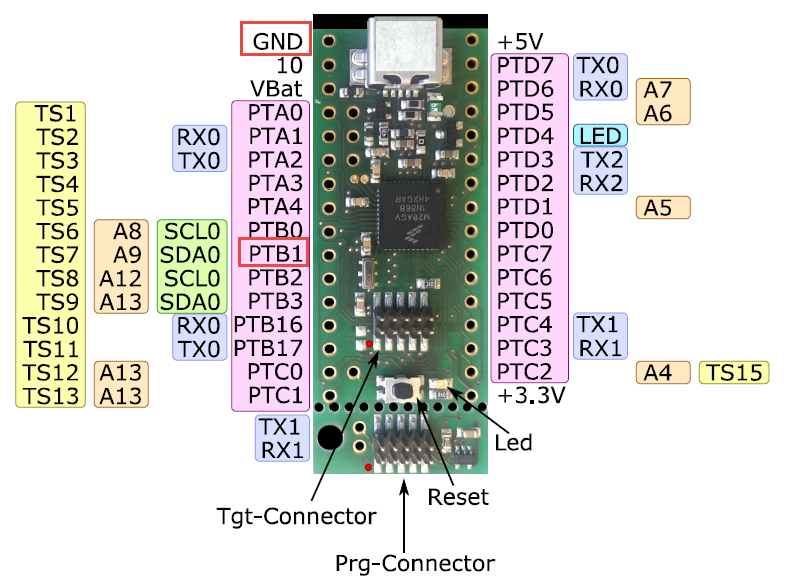
tinyK20 Remote Controller