It is interesting to see that modern tools and agile development workflows are getting more and more into the embedded world. CI/CD is a strategy where code changes to an application get automatically integrated, tested and released automatically into a production environment.
Sometimes I have a wish. Not every time it gets fulfilled. But this time I’m lucky and happy developer. A few days ago I wrote about the LPC4322-based SEGGER OB (on-board) J-Link firmware. It works great, but the board requires another USB cable to power the target board.
Rolf Segger contacted me, and a few days later I had a J-Link firmware with a ‘power-on’ feature:
That way, only one USB cable is needed. All what you need to do is to update the firmware.
Going with the factory default can be fine. But an upgrade could give a performance boost plus added functionality. Many of the NXP i.MX RT evaluation boards have an LPC4322 based debug circuit on it. One example for this is the i.MX RT1010 board.
NXP i.MX RT1010 EVK
On such boards, one of the first steps I do is: upgrading the firmware and change it to a better option: improved speed, SWO support plus avoiding issues with the USB MSD device.
Upgrading to a newer GNU toolchain always has its risks. That’s why I always recommend to stay on a given toolchain for production code.
But sometimes one needs to upgrade, or gets a code or project that works in one environment, but not in another. Today I have run into a problem with code read-out projection:
Disabled Automatic Placement of Code Read Protection
Well, the code read-out protection is not the root of the problem, but a good example why problems could occur.
Solar panels and electrical vehicles become more and more common in Switzerland. Ten years ago I installed solar panels. To use the available solar energy, the electrical vehicle charging box has been augmented with an open source charge controller. The controller monitors the building energy usage and adjusts the current using the Modbus connection to the charger.
But I did not had enough time to replicate this for a full set of classroom hardware. The original card boxes from NXP showed already after one semester severe wear, so I have to setup something more robust: a box to store all the cables, and an enclosure to protect the PCB, for 40 units.
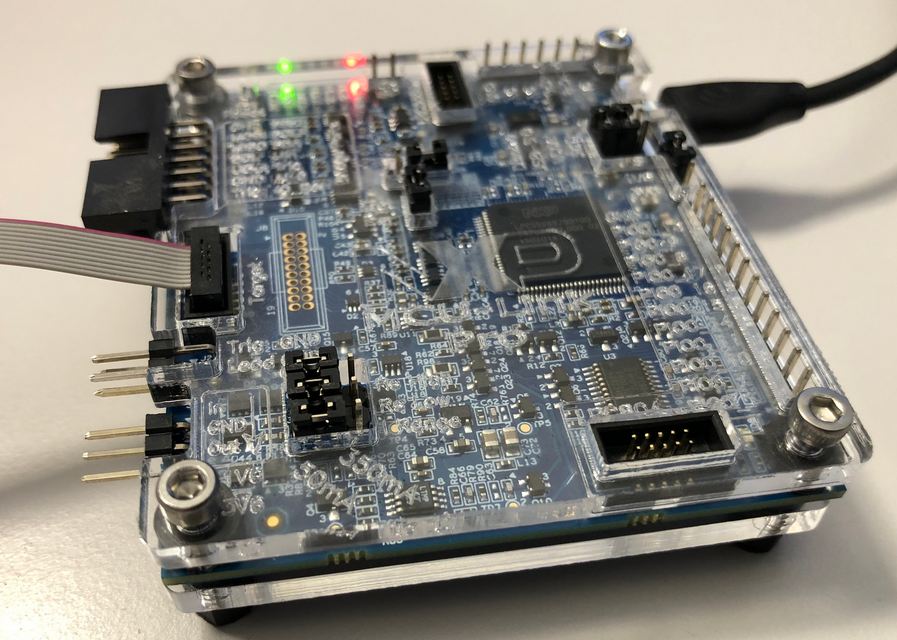
3D printing would take to much time, so I ended up with buying storage boxes and creating an laser-cut acrylic (PMMA) enclosure for the debug probe itself:
Dealing with and debugging distributed systems, I end up with multiple debug probes and target boards on my desk. When starting a debugging session, it can be hard to identify a debug probe by its serial number. What I do in such a situation: put a color stick on the debug probe and have it assigned a nickname.
Debug Probes with Nicknames
That nickname then shows up during the debug connection, and I’m sure I connect to the right probe and board that way.
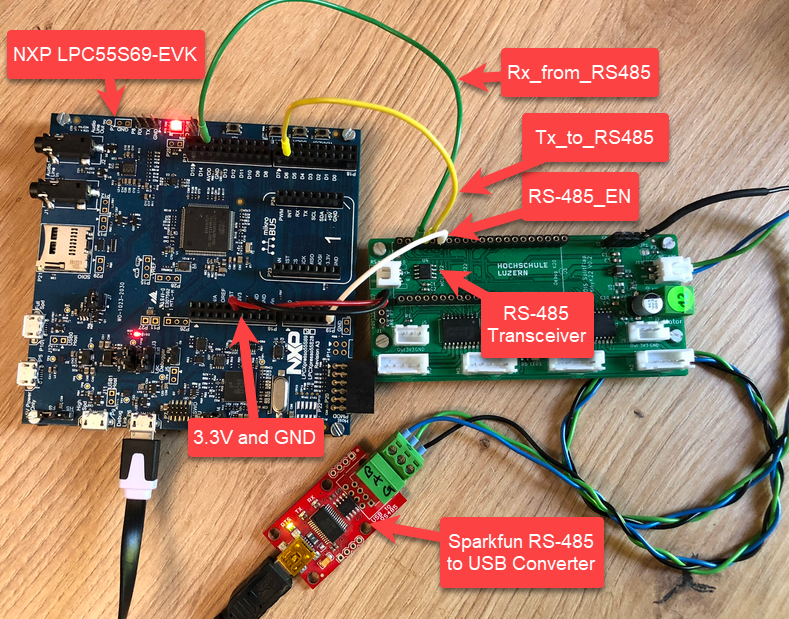
I’m using the RS-485 field bus in many of my projects: it is very reliable and robust, and easy to implement. And with ModBus there is standardized protocol used in building automation or industrial control applications. For example I’m using the protocol to communicate between battery systems and an EV Charger.
NXP LPC55S69-EVK with RS-485
In this article I show you with an example, how the NXP LPC55S69 can be used with RS-485.
It is August 1st, and Switzerland is celebrating its National Holiday. Rather cold and rainy, so this gets me some time to catch up on things. The preparation for the coming university semester in September is in full swing, and I have the honor to take over building up a new Master of Science in Engineering education module. In the existing courses I teach on the topic of embedded systems, I do use devices and MCUs from vendors like Broadcom, NXP, STM, Nordic, Raspberry Pi and Espressif. This not only means different SDKs, but different IDEs with different debug probes.
Just a subset of different hardware kits used in different labs
Eclipse has been the common factor in the mix with all these, and with all the pros and cons, it worked very well. With NXP having released support for Visual Studio Code, adding an announcement, and other vendors going into the same direction, I took the decision that I want to migrate my lab and lecture infrastructure to VS Code.
The Freescale K20DX128 MCU was one of the first ARM Cortex-M devices of that company (now NXP) back in 2012, and the FRDM-K20D50M board was the first ‘FRDM‘ board of a long and successful series of boards, starting back in 2013. I still have the K20 present in many of my designs. The challenge with ‘early’ or ‘legacy’ devices is that after a while, they are ‘not recommended’ any more, and it is hard to get support for them. So for example in newer tooling and software from NXP, there is no support for the K20.
So if you still have the K20 around, and need some newer tooling, then I have good news for you: It is possible to add that good-old-Kinetis to the list of supported LinkServer devices, so you are not stuck and can use newer debugging solutions for the K20.