Excellent news: I received this week the 40 INTRO Zumo Robot Base/Chassis PCBs, ready to bring the Zumo Robot project based on the FRDM-KL25Z board from Freescale to the next level:

Intro Zumo PCB TopSide

Excellent news: I received this week the 40 INTRO Zumo Robot Base/Chassis PCBs, ready to bring the Zumo Robot project based on the FRDM-KL25Z board from Freescale to the next level:
Intro Zumo PCB TopSide
On Friday, Freescale has updated CodeWarrior for MCU10 from V10.4 to V10.5, available on http://www.freescale.com/cwmcu10. I have not had much time to use it over the week-end, but here is a list of the things which in my view will make me switch my projects over to 10.5 and use it in my university classes:
The new semester is approaching fast! And I’m under pressure to get everything lined up and ready. This time, I want the students of the INTRO (Infotronic) course at the Lucerne University of Applied Sciences and Arts to have some fun with building and programming Mini-Sumo Robots 🙂

No chance to escape!

Rigi Schwinget (Picture: Roman Koch)
Every three years, there is the “Eidgenössisches Schwing- und Älplerfest” in Switzerland. A really big thing for us here. If you are not familiar with what this is, then have a read about the long tradition of Schwingen in Switzerland.
Wondering what “Schwingen” or wrestling has to do with a technology blog? It is about having fun with robots!
Self-Motivation: I write this post in the hope to cut the number of ‘please help me’ emails in my inbox ;-):
If you want to debug one of the Freescale boards with OpenSDA (FRDM-KL25Z, FRDM-K20, FRDM-KL05Z, FRDM-KL46Z48M, FRDM-KL02Z, TWR-KL47Z48M, …), and if you get this dialog …

No Device Available
… then read on.
Ahhhhrg! I admit: I’m not immune to all the silly problems an engineer can face in his life. And sometimes it is about the most basic things. This morning was again such a day: One of the infrared sensors of my Zumo Robot reported wrong values:
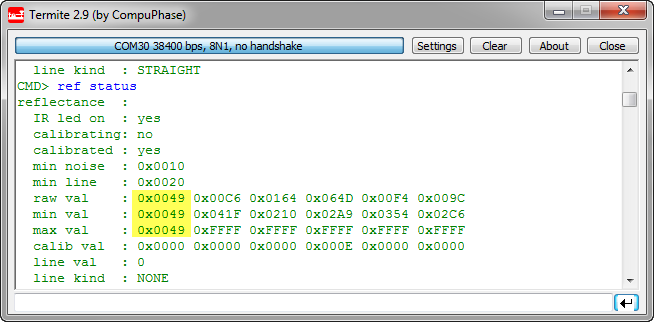
Sensor wrong values
I’m very, very proud about what the FSE (Formula Student Electric) team accomplished! After winning the overall 1st place in Silverstone (UK), the overall 2nd place in Hockenheim (Germany), they managed to win the Formula Student event in Spielberg (Austria) too 🙂
")
Julier in Spielberg (Benjamin Hildebrandt)
The ARM Cortex specification includes the ‘SysTick’ (System Tick Timer): a dedicated system timer which is intended to be used as time base for an RTOS. While technically it would be possible to use any periodic interrupt timer, I’m using as well the SysTick for my FreeRTOS ARM ports. And because Processor Expert includes a nice timer interface, I’m using the TimerUnit_LDD:
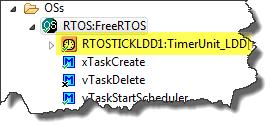
TimerUnit LDD for SysTick
While this is great for flexibility, it has its price in efficiency. That TimerUnit_LDD adds overhead. So I want to get rid of the TimerUnit_LDD and use a more efficient way.
As I was so pleased with the FRDM-KL46Z board, that I have ordered the Tower version of it, the TWR-KL46Z48M:
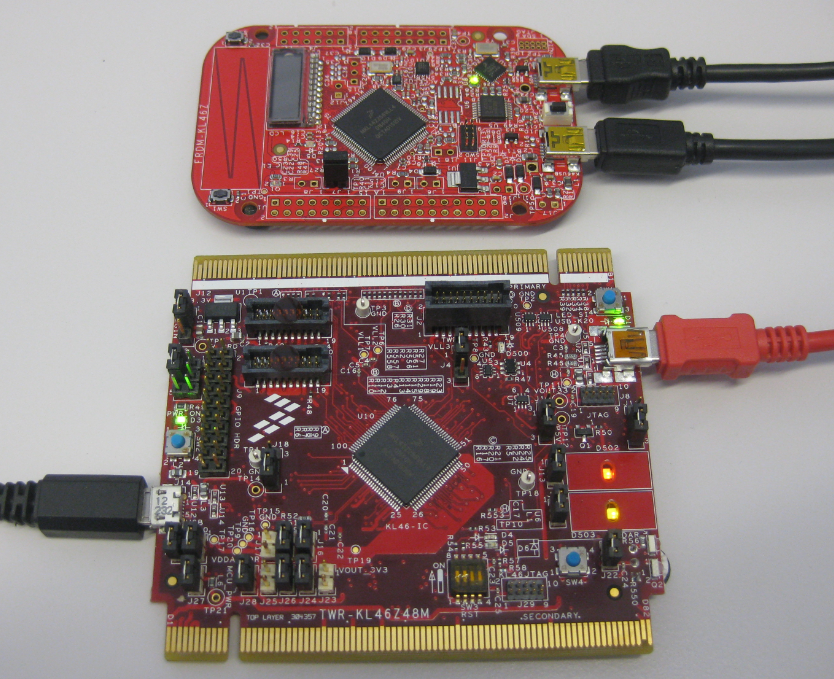
FRDM-KL46Z with TWR-KL46Z48M
What I missed so far was USB support for the KL46Z. So time to have a quick look at board(s) and to add USB support for it.
“A picture says more than 1000 words.”
I don’t know the source of that quote, but for sure it is true for every developer and engineer too. Engineers need to work a lot with numbers. But numbers can be transformed into pictures and graphs which can make complex things and relationships easier to understand. Verifying proper functionality of a PID closed loop controller or watching sensor values with a nice plot is definitely something very useful. Would it not be great to watch sensor data changing over time in a chart like the one below?
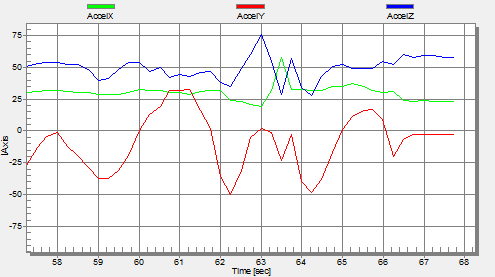
Accelerometer Graph
One way is to export data and then show it e.g. in Excel (which has been great chart functions). But even better, if this could be done directly with data provided from the target board? If you think this is hard to do, then I can show you how this can be done in a few steps with the help of a very nice tool: FreeMASTER 🙂
