Related to my earlier article about using OpenOCD, I want to share something I have learned (again) with OpenOCD v0.10.0:
I was running often into the following error:
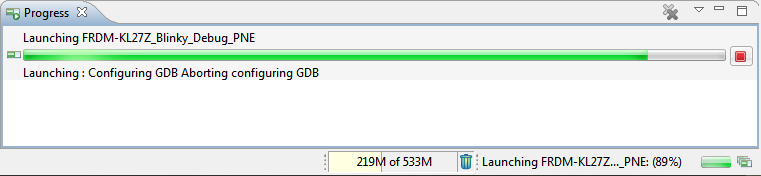
Warn : Cannot communicate... target not halted. Error: auto_probe failed Error: Connect failed. Consider setting up a gdb-attach event for the target to prepare target for GDB connect, or use 'gdb_memory_map disable'. Error: attempted 'gdb' connection rejected

OpenOCD cannot communicate