In “Debug Multiple Boards with GDB at the Same Time” I have used the Segger J-Link to debug multiple boards, from the same IDE, at the same time. The remaining question in that article was: how to do the same the P&E Multilink/OpenSDA?

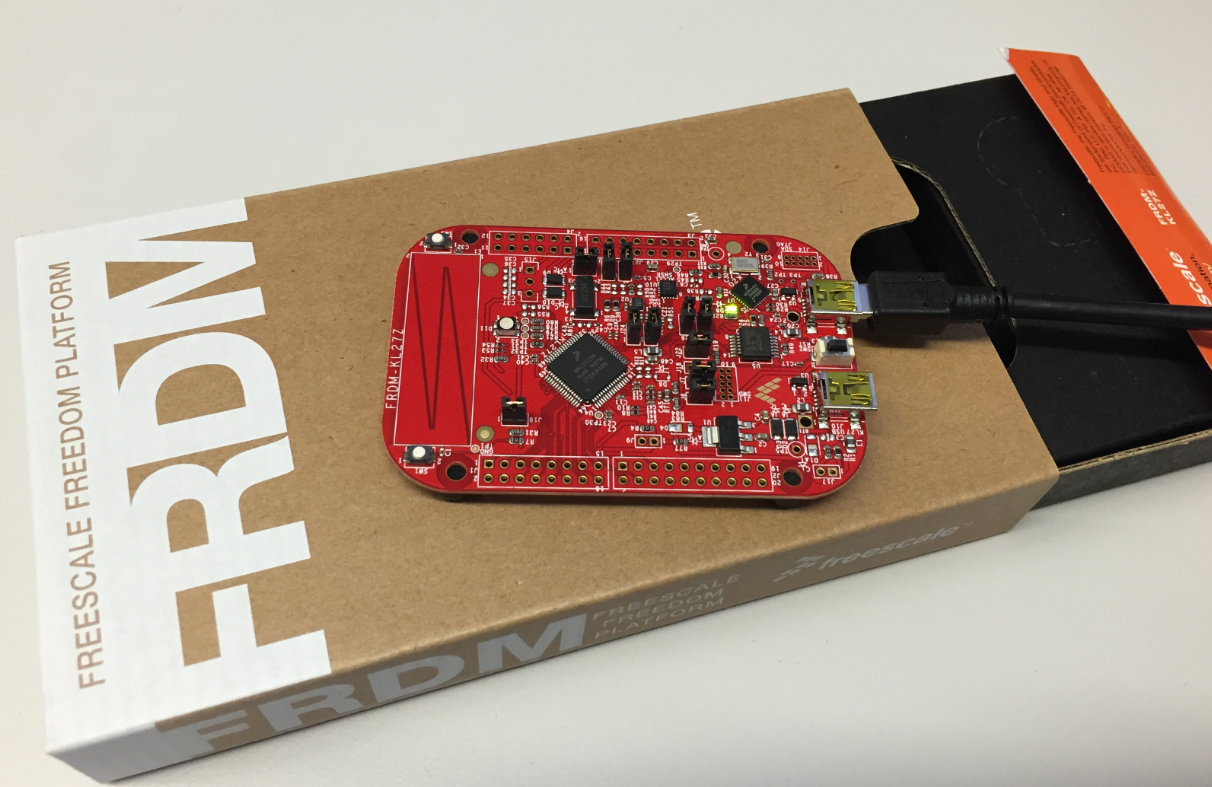
Debugging two NXP FRDM-KL27Z Boards with P&E Debugger the same time