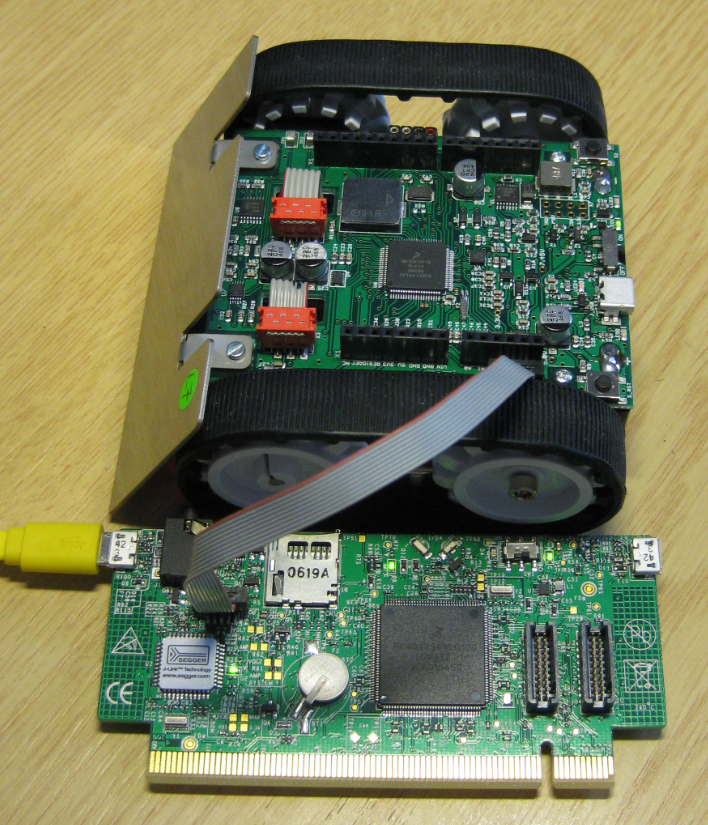
So here I have 50 new NXP Kinetis K22 Robot boards (see “Zumo Robot with Magnetic Encoders“), and they all need to be programmed with the first firmware on the bench:

Programming Robot Boards
The challenge is: how to do this in a fast an efficient way, without the need for an IDE or even host PC machine?