This is the second part of series or articles how to use the Microsoft Visual Studio Code for embedded development on ARM Cortex-M. In this part I’m going to show how to create and build a project using CMake running Make or Ninja as build system.

This is the second part of series or articles how to use the Microsoft Visual Studio Code for embedded development on ARM Cortex-M. In this part I’m going to show how to create and build a project using CMake running Make or Ninja as build system.
As time flies by, my projects are evolving. My lab projects get used over multiple semesters, and the MCUXpresso projects by default use the SDK version used at that time.

This is great because I do want to have control over what SDK is used. But from time to time it makes sense to upgrade a project to a newer version. In this post I’ll show how an existing project can be upgraded to use a new SDK.
Continue readingIf you are not aware (yet?): it looks like the COVID pandemic caused a global silicon and microcontroller shortage with lead times >50 weeks in some cases. The microcontroller I have used for the MetaClockClock build (see “New MetaClockClock V3 finished with 60 Clocks” and “MetaClockClock V4 for the Year 2021“) is affected by this too, but I had luck and still enough microcontrollers to build a few more boards.
So I still have enough for building a new variant with it (not finished yet). While everyone else is waiting for the devices to arrive, here are more details and instructions for your own build.

If you are developing Linux or desktop applications with GNU tools, you very likely are familiar with gcov: the GNU coverage tool. It collects data what parts of the code gets executed and represents that in different formats, great to check what is really used in the application code or what has been covered during multiple test runs.
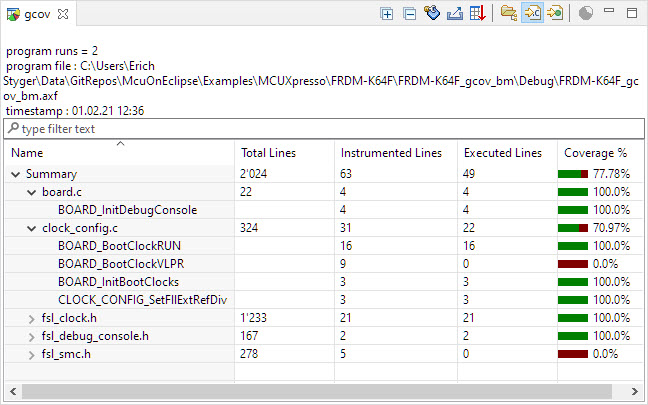
Coverage Information with gcov
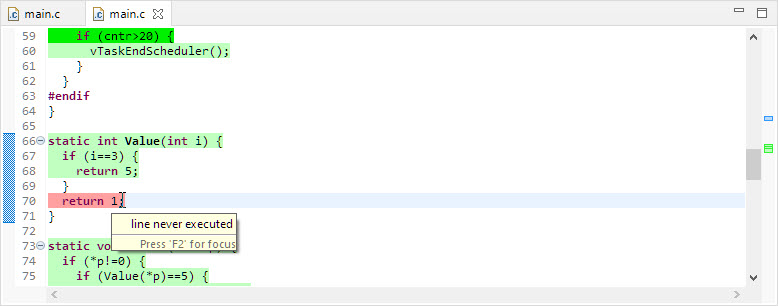
line never executed
GNU coverage is possible for resource constraint embedded systems too: it still needs some extra RAM and code space, but very well spent for gathering metrics and improves the firmware quality. As I wrote in “MCUXpresso IDE V11.3.0 for 2021” things are now easier to use, so here is a short tutorial how to use it.
There are many different aspects of Open Source projects: It is not only about the fact if the sources are available (‘open’). It is about the licensing terms (how permissible is it, what can I do with it), maintenance and continuous development (what has changed between releases), how and where is it delivered (Sourceforge, dedicated distribution, packaging) up to collaboration (how can I contribute or submit issues).
NXP has now published the MCUXpresso SDK on Github:
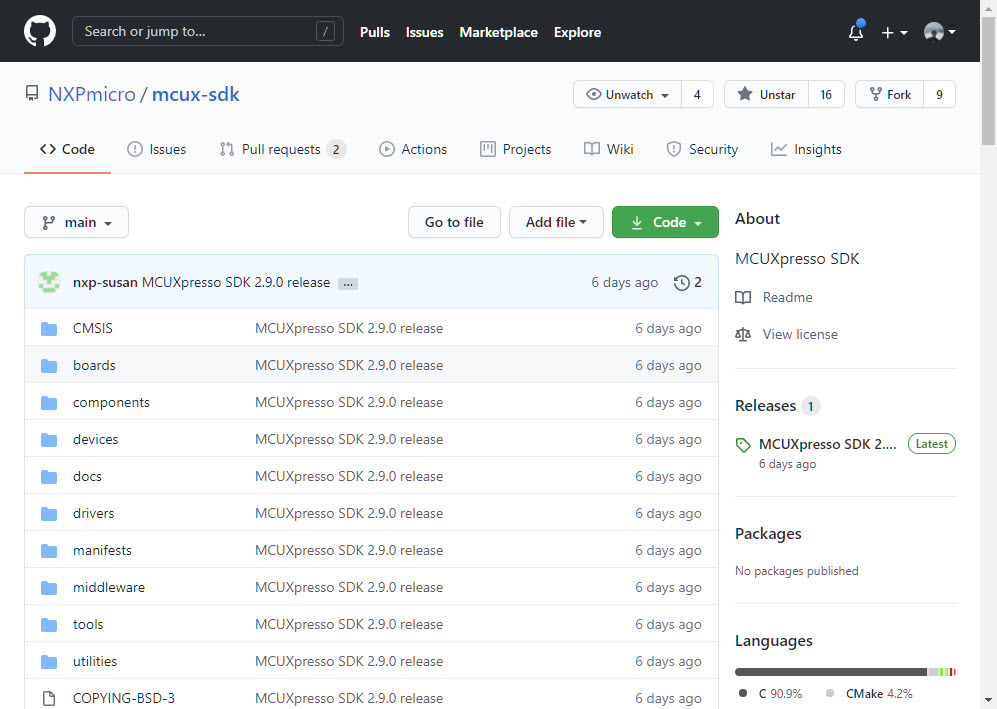
MCUXpresso SDK on GitHub
Something I was waiting for a long time.
The Eclipse CODAN (Code Analysis) plugin is part of CDT and is a powerful static analysis tool finding all kind of possible bugs and issues. Still to my surprise not many C/C++ developers take advantage of it maybe because they are not aware that it exists?
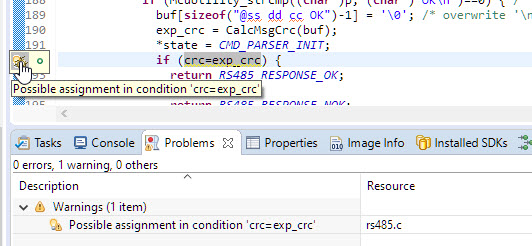
ups! Programming error detected by CODAN
In this article I show a few tips how to effectively use it, especially with the NXP MCUXpresso SDK.
The holiday break at the end of the year is always a good time to finish projects started during the year. This one is about my ‘MetaClockClock’ Version 3.

2020 with Red Hands on Blue
The NXP Kinetis devices implement a UID (Unique ID) for each device, using the ‘Unique Identification Register) which is part of the SIM (System Integration Module):

SIM Unique ID (NXP K22P144M120SF5RM.pdf Reference Manual)
While this number should be unique, I was wondering last week why students in the labs reported the same UID for multiple robots in the lab. So maybe this number is not so unique as it should be?
Continue reading
Having visibility and insights into a running system is highly valuable or critical: not only for optimizations but as well to verify the system design and behavior. In Getting Started with Microsoft Azure RTOS (aka ThreadX) I showed how to quickly run Azure RTOS. This article is about getting trace out of an ThreadX application and show it in TraceX.
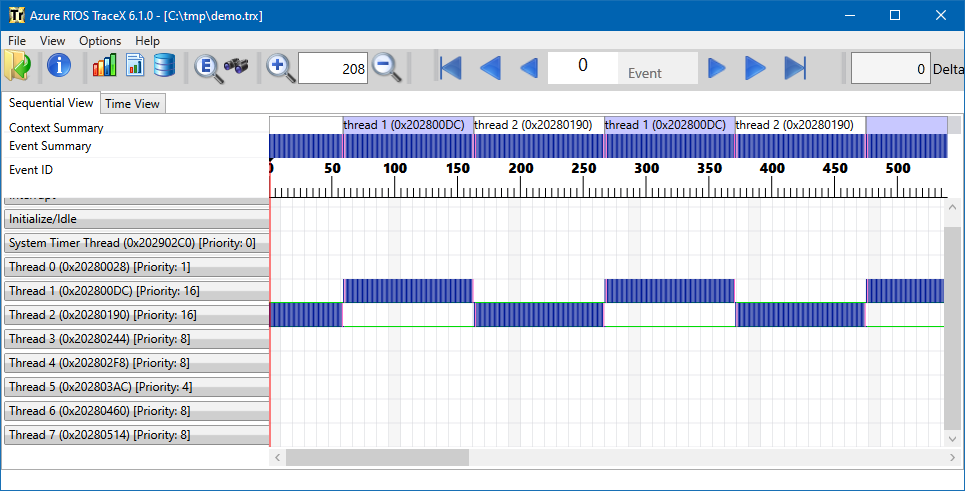
Azure RTOS TraceX
Reentrancy is an attribute of a piece of code and basically means it can re-entered by another execution flow, for example by an interrupt or by another task or thread. This is an important concept and still a lot of code ‘in the wild’ does violate reentrancy. As a result the application crashes immediately in the best case. Worse it crashes randomly or even worse it behaves incorrectly 😦 .
Reentrancy is always a concern if using standard library functions, including printf() or malloc(). FreeRTOS offers a reentrant wrapper to the standard malloc() and free() (Memory Scheme 3)

Running FreeRTOS with reentrant newlib
