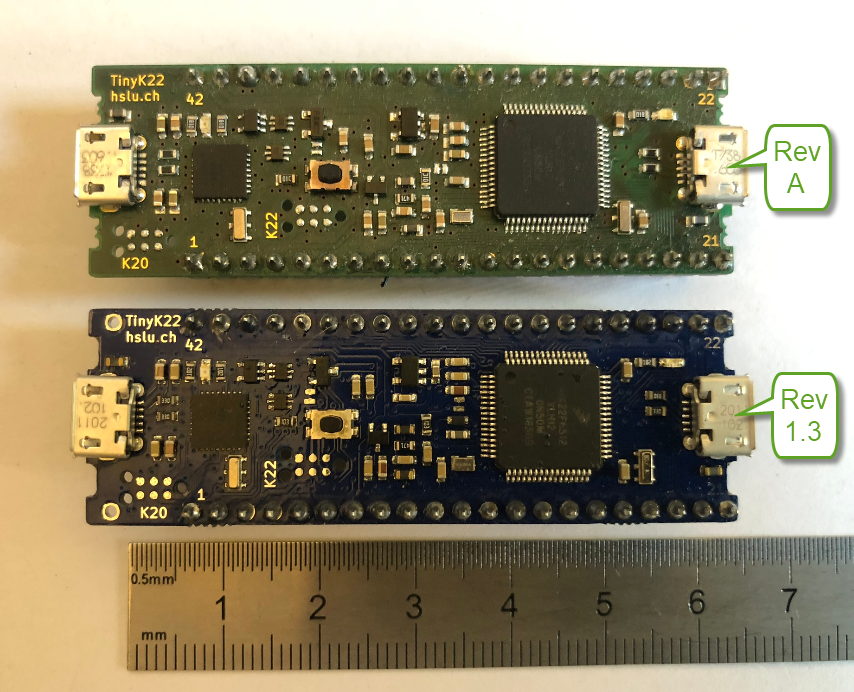
The tinyK22 board is a tiny micro controller board we use at the Lucerne University of Applied Sciences and Arts. It is used in many research project, used in lectures and labs and used in most student projects. Because there was no small and breadboard friendly NXP Kinetis board with a debug interface available, we developed one featuring the NXP K22FN512, named the ‘tinyK22‘. Because of the success and high demand we stated a new large production run and used this to upgrade the board to the new Rev 1.3: you might notice already the color change :-).
tinyK22