While developing a data logger for an advanced UAV inertial sensor I had to think about the quote below several times:
“There are two ways of constructing a software design: One way is to make it so simple that there are obviously no deficiencies, and the other way is to make it so complicated that there are no obvious deficiencies. The first method is far more difficult. It demands the same skill, devotion, insight, and even inspiration as the discovery of the simple physical laws which underlie the complex phenomena of nature.”
C. A. R. Hoare
Still my design is not simple, and still I have to discover the not so simple physical laws of that sensor :-(.
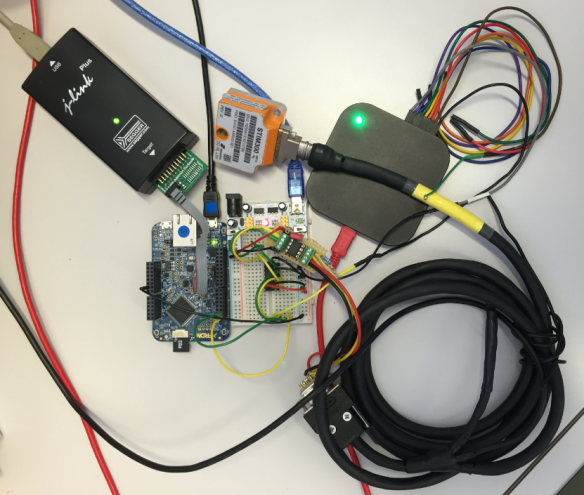
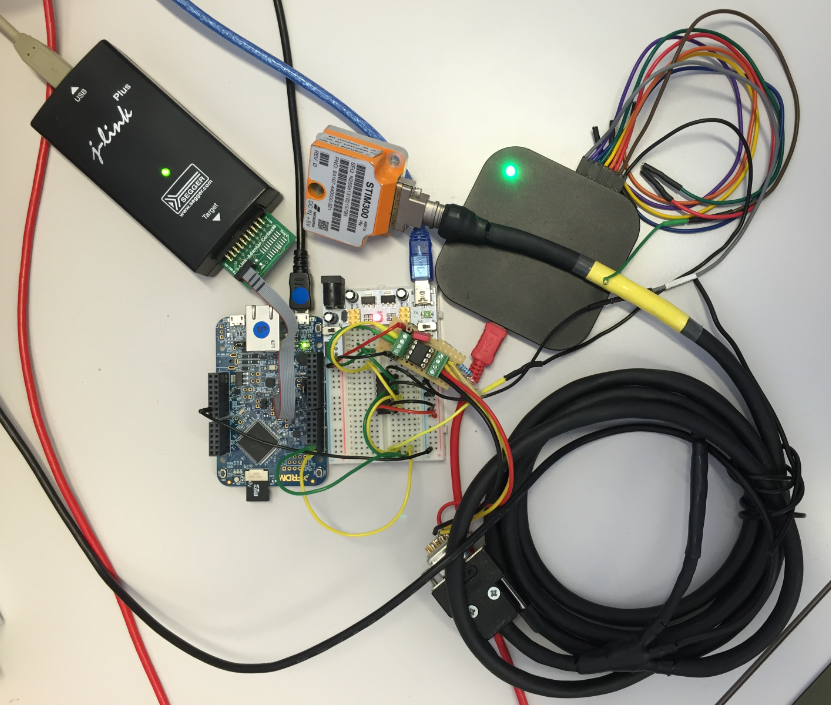
Inertial Sensor Setup
That quote from Sir Charles Antony Richard Hoare is so true. In case you did not know: he is the one who developed the quicksort algorithm. With this and all his other work he shaped the software and computer industry. And reminds me about the challenges and difficulties of constructing software……
Happy Constructing 🙂