
I’m using FreeRTOS in most of my applications. There were only a few exceptions where an RTOS has to be used in safety critical systems: there usually it is not permitted to use any dynamic memory allocation because this adds the risk that a memory allocation could fail at runtime because of memory fragmentation or memory leak. And FreeRTOS uses a dynamic memory (heap) for the task stacks and the RTOS resources including semaphore, mutex and queues.
This is now a thing of the past. This week a new FreeRTOS Version 9 was released which does not need any dynamic memory allocation anymore: it is possible now to build completely statically allocated systems with FreeRTOS :-).
Dynamic and Static Memory Allocation in FreeRTOS V9.0.0
FreeRTOSConfig.h: Static or Dynamic?
Beside of avoiding a ‘out of memory’ at application runtime, static allocation for the RTOS resources has another benefit: if using the heap, I always have to make sure it is large enough. Means that usually it needs to be somewhat larger than really needed. That way some RAM is wasted which is a problem for small embedded systems. So having things statically allocated is a better approach to me. But using static memory allocation in FreeRTOS does not mean that I cannot use dynamic memory any more: actually I can have both if I want :-).
To configure how the memory is used,The FreeRTOSConfig.h has two more defines:
#define configSUPPORT_DYNAMIC_ALLOCATION 1 /* 1: make dynamic allocation functions for RTOS available. 0: only static functions are allowed */ #define configSUPPORT_STATIC_ALLOCATION 0 /* 1: make static allocation functions for RTOS available. 0: only dynamic functions are allowed */
Either one or both can be turned on (set to 1). So it is possible mix static and dynamic allocation in the same application.
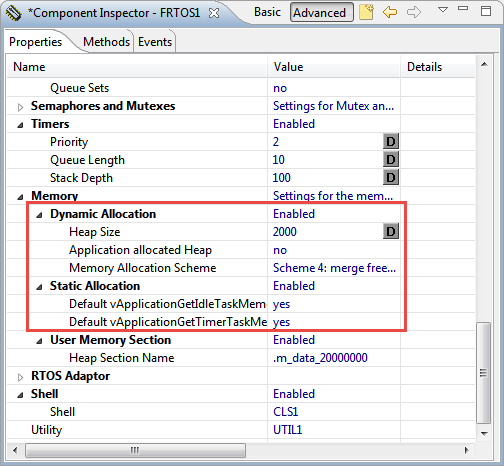
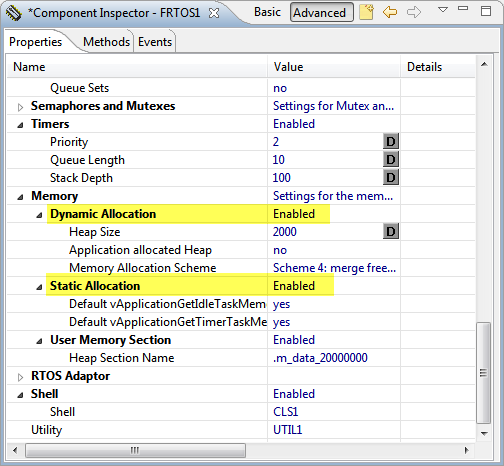
The Processor Expert component has two settings for the two defines:
Dynamic and Static Memory Allocation in FreeRTOS V9.0.0
Static FreeRTOS API Functions
With the following define
configSUPPORT_STATIC_ALLOCATION
FreeRTOS API functions are available which all are using static memory:
- xTaskCreateStatic()
- xQueueCreateStatic()
- xEventGroupCreateStatic()
- xTimerCreateStatic()
- xSemaphoreCreateBinaryStatic()
- xSemaphoreCreateCountingStatic()
- xSemaphoreCreateMutexStatic()
- xSemaphoreCreateRecursiveMutexStatic()
The above functions are versions of their ‘dynamic’ counterparts. Each of the ‘static’ API functions needs to have at least one additional pointer to the persistent (not on the dynamic stack!!) allocated buffer memory. For the task API an additional data pointer is needed for the TCB (Task Control Block) memory. I’m showing in the next sections examples how the API is used. I’m using macros from the FreeRTOSConfig.h to make things portable between ‘static’ and ‘dynamic’ implementations.
Application Functions for Idle and Timer Tasks
When turning on static memory allocation (configSUPPORT_STATIC_ALLOCATION), then the IDLE task will be allocated in a static way. In that case I have to provide the memory for the IDLE task with the following code:
#if configSUPPORT_STATIC_ALLOCATION
/* static memory allocation for the IDLE task */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[IDLE_TASK_SIZE];
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize) {
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = IDLE_TASK_SIZE;
}
#endif
In a similar way, if software timers are enabled with configSUPPORT_STATIC_ALLOCATION enabled, an application provided function needs to be provided:
#if configSUPPORT_STATIC_ALLOCATION && configUSE_TIMERS
static StaticTask_t xTimerTaskTCBBuffer;
static StackType_t xTimerStack[configTIMER_TASK_STACK_DEPTH];
/* If static allocation is supported then the application must provide the
following callback function - which enables the application to optionally
provide the memory that will be used by the timer task as the task's stack
and TCB. */
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer, StackType_t **ppxTimerTaskStackBuffer, uint32_t *pulTimerTaskStackSize) {
*ppxTimerTaskTCBBuffer = &xTimerTaskTCBBuffer;
*ppxTimerTaskStackBuffer = &xTimerStack[0];
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
#endif
The Processor Expert FreeRTOS component has two settings to add these two functions automatically to the application code:

Default Memory Functions
Static Task
The static version of task creation API requires two additional pointers: one for the TCB (Task Control Block) and one for the task stack itself.
The example below shows both the dynamic and static allocation version of creating a task.
#define SHELL_TASK_SIZE configMINIMAL_STACK_SIZE+100
#if configSUPPORT_STATIC_ALLOCATION
#if configUSE_HEAP_SECTION_NAME
#define SECTION __attribute__((section (configHEAP_SECTION_NAME_STRING)))
#else
#define SECTION /* empty */
#endif
static StaticTask_t SECTION xTaskTCBBuffer;
static StackType_t SECTION xStack[SHELL_TASK_SIZE];
#endif
void SHELL_Init(void) {
#if configSUPPORT_STATIC_ALLOCATION
if (xTaskCreateStatic(ShellTask, "Shell";, SHELL_TASK_SIZE, NULL, tskIDLE_PRIORITY+1, &xStack[0], &xTaskTCBBuffer)==NULL) {
for(;;){} /* task creation failed */
}
#else /* configSUPPORT_DYNAMIC_ALLOCATION */
if (xTaskCreate(ShellTask, "Shell", SHELL_TASK_SIZE, NULL, tskIDLE_PRIORITY+1, NULL) != pdPASS) {
for(;;){} /* error, maybe out of heap memory? */
}
#endif
}
In the above example with GNU gcc for ARM I have the ability to allocate the static memory in a special linker segment. Note that xTaskCreateStatic() now directly returns the task handle.
Static Semaphore and Mutex
Similar to static task creation, the following shows both the static and dynamic version of a binary semaphore creation:
static xSemaphoreHandle sem; #if configSUPPORT_STATIC_ALLOCATION static StaticSemaphore_t xSemaphoreBufferSem; #endif #if configSUPPORT_STATIC_ALLOCATION sem = xSemaphoreCreateBinaryStatic(&xSemaphoreBufferSem); #else /* configSUPPORT_DYNAMIC_ALLOCATION */ sem = xSemaphoreCreateBinary(); #endif
It works the same way for mutex:
static xSemaphoreHandle mutex; #if configSUPPORT_STATIC_ALLOCATION static StaticSemaphore_t xMutexBuffer; #endif #if configSUPPORT_STATIC_ALLOCATION mutex = xSemaphoreCreateMutexStatic(&xMutexBuffer); #else /* configSUPPORT_DYNAMIC_ALLOCATION */ mutex = xSemaphoreCreateMutex(); #endif
Static Timer
The code below shows the static and dynamic way of creating a software timer:
static TimerHandle_t handle; #if configSUPPORT_STATIC_ALLOCATION static StaticTimer_t xTimerBuffer; #endif #if configSUPPORT_STATIC_ALLOCATION handle = xTimerCreateStatic( "swtimer";, /* debug name of task */ pdMS_TO_TICKS(500), /* period */ pdTRUE, /* auto-reload */ NULL, /* no timer ID */ vTimerCallback, /* callback */ &xTimerBuffer ); #else /* configSUPPORT_DYNAMIC_ALLOCATION */ handle = xTimerCreate( "swtimer", /* debug name of task */ pdMS_TO_TICKS(500), /* period */ pdTRUE, /* auto-reload */ NULL, /* no timer ID */ vTimerCallback /* callback */ ); #endif
Static Queues
The code below shows both the static and dynamic version to create a queue:
#define QUEUE_LENGTH 16 /* items in queue */ #define QUEUE_ITEM_SIZE sizeof(char*) /* each item is a char pointer to a string, allocated in the heap */ #if configSUPPORT_STATIC_ALLOCATION /* xQueueBuffer will hold the queue structure. */ static StaticQueue_t xQueueBuffer; /* ucQueueStorage will hold the items posted to the queue. Must be at least [(queue length)*(queue item size)] bytes long. */ static uint8_t ucQueueStorage[QUEUE_LENGTH*QUEUE_ITEM_SIZE]; #endif #if configSUPPORT_STATIC_ALLOCATION SQUEUE_Queue = xQueueCreateStatic(QUEUE_LENGTH, QUEUE_ITEM_SIZE, &ucQueueStorage[0], &xQueueBuffer); #else /* configSUPPORT_DYNAMIC_ALLOCATION */ SQUEUE_Queue = xQueueCreate(QUEUE_LENGTH, QUEUE_ITEM_SIZE); #endif
NXP Kinetis SDK
I have successfully ported the RTOS for the NXP Kinetis SDK V2.0, and the port and example project for the FRDM-K22F board is located here: https://github.com/ErichStyger/mcuoneclipse/tree/master/Examples/KDS/FRDM-K22F/FRDM-K22F_USB_Mouse_Kybd_SDK_v2.0

FreeRTOS running on NXP FRDM-K22F Board
Currently not everything in the SDK allows for static allocation. For example the USB stack in the SDK is still using dynamic allocation methods. I assume this will be updated in a next release. Otherwise you can see in the above example how I have made some of the allocation static.
Other Changes in FreeRTOS V9.0.0
Beside of static memory allocation, there are other good extensions in version 9 (see http://www.freertos.org/FreeRTOS-V9.html):
- New function xTaskAbortDelay() to force a task out of the blocked state by another task.
- If a task gets deleted by another task with vTaskDelete(), the task stack and TCB (Task Control Block) was freed by the Idle task. Now it the memory is released right away except the task deletes itself, then still the Idle task does the release.
- New hook vApplicationDaemonTaskStartupHook() which executes when the RTOS timer task starts.
- Tickless idle mode can now be used with cooperative multitasking mode (configUSE_PREEMPTION set to 0).
- All the heap memory types support now configAPPLICATION_ALLOCATED_HEAP which can be used for custom heap allocation.
- New vTaskGetInfo() function to retrieve the status of a single task.
- New uxSemaphoreGetCount() function to get the counter of the semaphore, e.g for a counting semaphore or the binary status of a normal (binary) semaphore.
FreeRTOS Trace
I had to update the Segger SystemView and Percepio Tracealizer libraries for a few API changes in FreeRTOS V9.0.0. The changes were rather minimal, and both are running now with V9 of FreeRTOS.

Segger SystemView with FreeRTOS V9.0.0

Tracealizer with FreeRTOS V9.0.0
For the Percepio Tracealizer with Segger RTT I have extended the library to support static TrcCtrl task creation.
Summary
The avoidance of any dynamic memory allocation in FreeRTOS greatly extends the usage of this already very popular RTOS especially into safety critical systems or any other critical systems. For example we have now migrated a space project at the university from different RTOS to FreeRTOS as now it fulfils the our requirements for running a payload system on a satellite. I have migrated a few robotics project from FreeRTOS V8.x.x to the V9.0.0 version without any issues.
An update of the Processor Expert components is planned for today.
Happy Static’ing 🙂
Links
- FreeRTOS Version 9: http://www.freertos.org/FreeRTOS-V9.html
- FreeRTOS: http://www.freertos.org

The possibility of building fully statically allocated applications was one of the main requirements of the original CMSIS++ RTOS specifications, and one of the first complaints to the ARM CMSIS RTOS specs (#37, unfortunately ignored, like most others suggestions filed).
It’s good to see that other RTOSes acknowledged this important feature.
FYI, here is how threads are created in CMSIS++ RTOS:
// Dynamically allocated thread, default stack size. thread th1 { "thread1", func, nullptr }; // Statically allocated thread, with default stack size. thread_static<> th2 { "thread2", func, nullptr }; // Statically allocated thread, with custom stack size. thread_static<STACK_SIZE> th3 { "thread3", func, nullptr };Similarly, here is how a static queue of 7 structures of type my_msg_t is created in CMSIS++ RTOS:
message_queue_static<my_msg_t, 7> q1 { "queue1" };Slightly simpler than what you just presented in your post, I would say.
LikeLike
due to a small editing mistake, the angular brackets in the code were removed by WordPress; the code should read
– thread_static<> th2
– thread_static<STACK_SIZE> th3
– message_queue_static<my_msg_t, 7> q1
LikeLike
Hi Liviu,
yes, posting code is a pain in WordPress, it tends to remove things 😦
I have updated now your code in the comment.
Erich
LikeLike
Hi Erich
Thank you for your valuable blog!
Please note that your code examples in this post got messed up by wordpress.
I.e. instead of the & it shows the HTML entity &
LikeLike
Hi George,
thanks for letting me know. Yes, WordPress has messed this up :-(. I have fixed it now, so hopefully it stays fixed.
LikeLike
Pingback: First steps: ARM Cortex-M7 and FreeRTOS on NXP TWR-KV58F220M | MCU on Eclipse
Great feature drilldown! As a developer of a safety critical filesystem for FreeRTOS (www.datalight.com/reliance-edge), the static memory allocation was great news for me. I also appreciated that they kept the version 9 changes backwards-compatible, so that users can drop in the update without redoing their code base.
LikeLike
Do you know when the Kinetis SDK will be updated to include FreeRTOS V9? Or is it possible to manually use FreeRTOS V9 with a KSDK project?
LikeLike
It is rather easy to swap out the FreeRTOS in the SDK V2.0 directory structure. I have done this e.g. in this project on GitHub: https://github.com/ErichStyger/mcuoneclipse/tree/master/Examples/KDS/FRDM-K22F/FRDM-K22F_USB_Mouse_Kybd_SDK_v2.0
LikeLike
That’s great to hear. I will give it a try. Thanks!
LikeLike
Pingback: FreeRTOS Kernel Awareness with Ozone | MCU on Eclipse
Pingback: Tutorial: Running FreeRTOS on NXP i.MX7Dual Cortex-M4F | MCU on Eclipse
Pingback: Building the NXP BLE Stack with Open Source GNU and Eclipse Tools | MCU on Eclipse