I’m working with a student on building a small autonomous robot platform, based on the FRDM-KL25Z board. We integrated new software modules, compiled and linked, and then downloaded the application to the board. While debugging and stepping through the application startup, I had this:
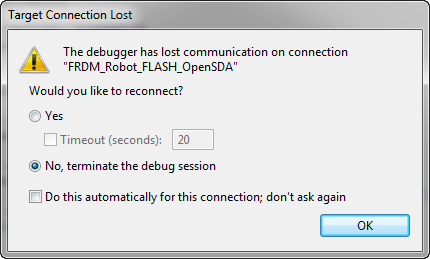
The Debugger has lost communication on connection
Outsch! That’s not good. Even worse, trying to connect again to the board failed :-(. What happened?