My wife tells me that I have too many boards on my desk. That is only *partially* correct: there are many, but not *too* many. But I’m working on too many tasks, but that’s a different aspect :-). I’m using more and more the Kinetis SDK V2.0, and as a result of this I have multiple SDKs installed on my machine. Because with the SDK V2.0 I get a download for each device/board installed (see “First NXP Kinetis SDK Release: SDK V2.0 with Online On-Demand Package Builder“). So my list of SDK folders is growing, as shown with the ‘New SDK 2.x’ wizard in Kinetis Design Studio:
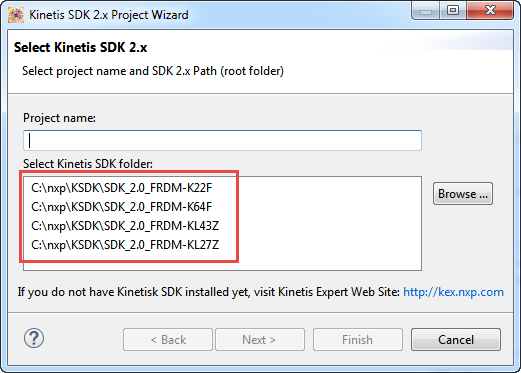
Multiple Kinetis SDKs
The same time, the amount of free disk space is reducing. What if I could combine all these SDK’s?