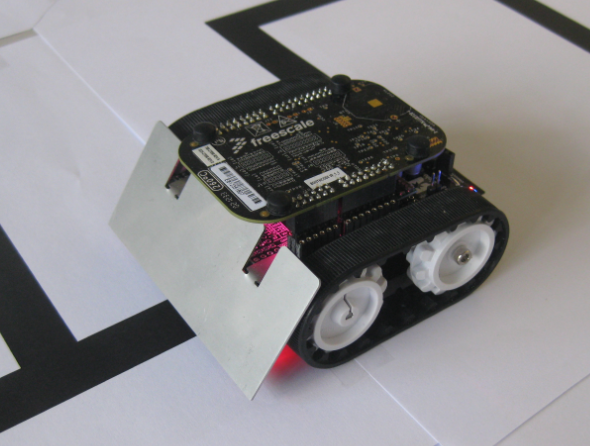
The maze solving robot based on the Freedom FRDM-KL25Z and Pololu Zumo shield has new features:
- For dead-end paths, instead turning around, the robot is driving backward
- Higher speed for going forward/backward/turns
- In the finish area, the robot turns around
- It reverts the solution path, so the robot can directly run from the finish area to the start

FRDM-KL25Z Robot on Practice Area