
For next semester I plan to use the tinyK20 as a remote controller for the Zumo Robots. I already had an early prototype presented in “3D Printed Gameboy and Remote Controller with tinyK20 Board“, so here is the next iteration of, in a sneak preview:
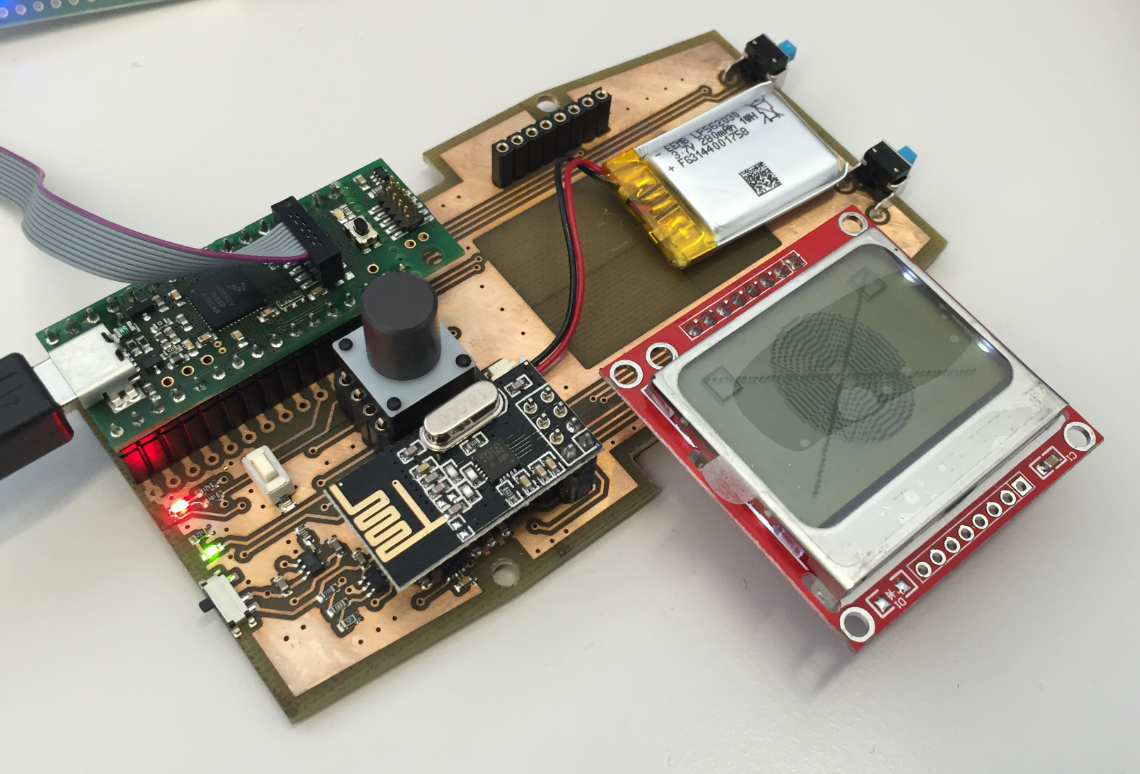
Remote Controller Prototype
It fits into a blue transparent enclosure like this (the holes on the top for the LCD and joystick are not done yet:
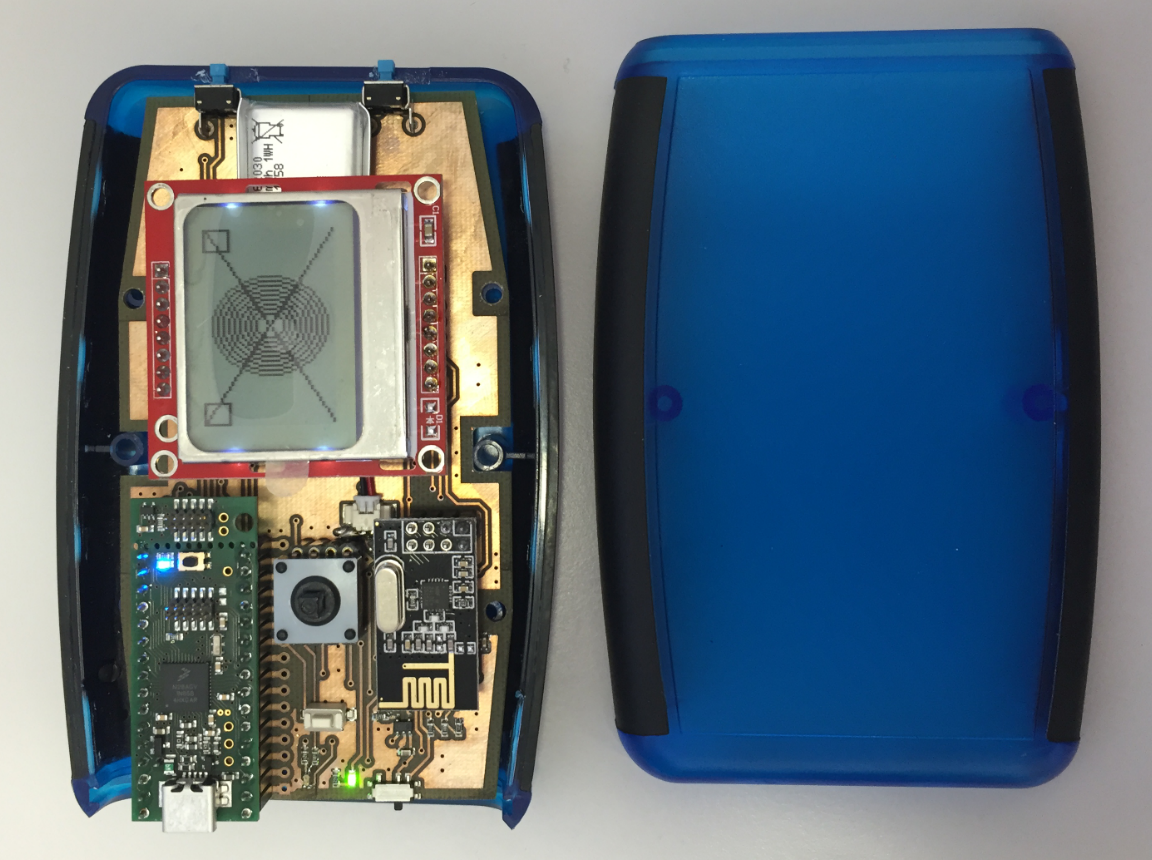
tinyK20 as remote controller with enclosure
The prototype has the following features:
- tinyK20 (NXP Kinetis K20, ARM Cortex-M4 running at 50 MHz with 128 KByte of FLASH), used both as main controller and as open source debug probe
- Nordic Semiconductor nRF24L01+ 2.4 GHz wireless transceiver
- 4 way plus middle button joystick
- Graphical LCD (Nokia 84×48 pixels)
- USB rechargeable LiPo battery
- two extra side push buttons
The joystick is used to navigate through the menus on the display, plus to drive around the robot.
As an option, I’m thinking about adding a Semtech LoRa (Long Range) 433 MHz radio module as an option. That way I would have a cool IoT device which can communicate several kilometers and the same time can be used as data logger :-).
Thanks to Andreas for creating that first prototype and helping me creating this new tool for the next semester!
Happy Prototyping 🙂

Hi Erich!
Have you tryed KW kinetis? They have both Lora and 6lowpan stack. Looks like 1 processor can replace both in your current project. The only problem to try it is the insane price of kw-freedom board. It looks like they don’t want to sell it to peoples but you can get it for free i bet. It would be interesting to read about KW’s.
Recently i’ve tryed cypress ble psocs-it super easy to use and IDE is a step further compared to PE.
I remember NXP promised to release code-gen to change PE for ksdk2.0 in the second half of summer. Was it a fake or PINS was the tool?
Best regards,
Alexey.
LikeLike
Hi Alexey,
I have looked at KW, but as you say: the price point is simply far to high to be considered. This makes the entry level really high. The other thing I saw is that the source code is not provided (see https://mcuoneclipse.com/2016/07/12/hexiwear-teardown-of-the-hackable-do-anything-device/ where it includes a KW40 device) and only libraries are provided, and only for IAR :-(. Asking students to spend $3000 for the IDE and $200 for a FRDM board simply does not work.
So from the KW perspective, the Hexiwear is a much better option than the FRDM-KW40Z. But as long the sources are not open and I have to buy expensive tools, that does not work for my use cases. I think the KW is targeted explicitily not to the hobby market and only to companies which have the neecessary budget. And I have used the Cypress tools too, and I agree: they took many concepts of Processor Expert and have developed it further for an even better tool.
And yes, the Pins tools is the first tool starting from PE to the SDK v2.0, there should be more tools coming out towards the year end.
You mention that KW supports LoRa? This is new to me: it does support BLE and IEEE801.15.4, but not LoRa to my knowledge.
And more of a general philosphy I have: If space is not that much of a concern, or the number of boards is not extremely high, I prefer to have a dedicated microcontroller and a dedicated transceiver chip: I have been disappointed too many times in the past with ‘bundles’: either the microcontroller has issues, or the transceiver, or both. Having them in dedicated ICs gives me much more flexitility and visibility (e.g. for debugging).
Erich
LikeLike
Hi Erich,
Thank you for detailed answer!! I have not recieved a letter that you answered me so i late with my answer.
About LoRa: it is my fault. They got a 6LowPan fork called Thread: http://threadgroup.org/what-Is-thread
http://www.nxp.com/pages/thread-networking-protocol:THREAD-NETWORKING-PROTOCOL
As concern BLE just downloaded that file: https://www.nxp.com/webapp/sps/download/preDownload.jsp
and it contains a pdf describing how to add that lib to ksdk. Still have no board to try it.
Ricently i’ve done project with my friends with PSoC BLE-it is just awesome tool and you can buy Sertefied 10×10 module for about 18$ and standalone psoc for about 5$ dirrect buy and cheapper modules with 2.54 header to plug(not certified without can on it).
About a year I have 3 samples of kw21z and my arm
itching to test it:) But there are 2 much variables with home-made board i would meet-starts from the antenna pcb tracing and finished with unknown stack:( So i hope you can clearefy it 😛
From IoT perspective KW’s series looks promissing. Don’t know why do they have their tools for it so expencieve.
Best wishes,
Alexey.
LikeLike
Hi Alexey,
about the BLE NXP stack: I have downloaded it, but it came only with the libraries (not the source files). So I cannot build it and debug it with standard toolchains and IDE’s.
About antenna designs: I’m not an expert on this, I have that expertise in the university group so I don’t need to worry about it. But there should be design houses available which could help you with this.
Especially embedding the antenna into an enclosure requires careful engineering and simulation to make a good antenna.
Erich
LikeLike
y, i got it now. Weired desision from NXP again.
LikeLike
https://community.nxp.com/thread/430866
i hope they got plans to start it under ksdk and kds.
LikeLike
Pingback: INTRO Robot Remote – First Production PCB | MCU on Eclipse