
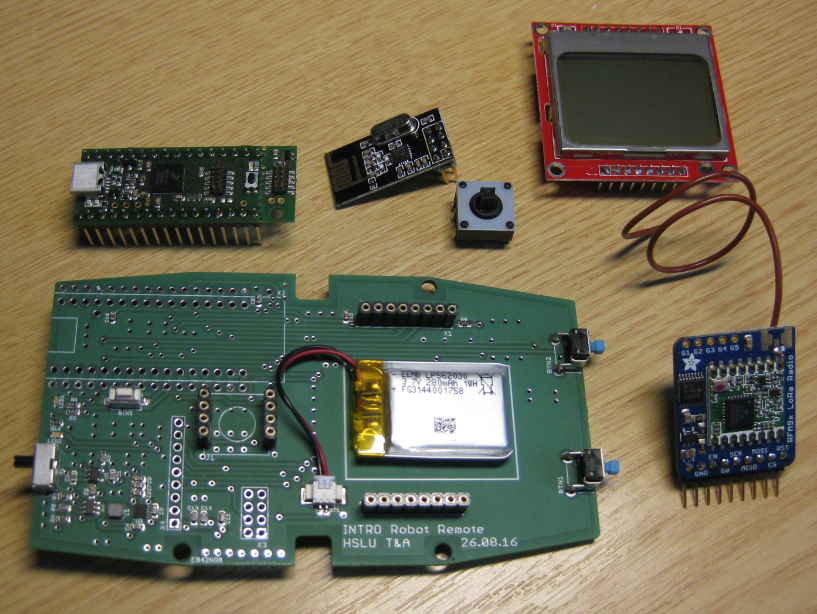
After the first prototype (see “Prototype of Wireless Remote Controller with NXP Kinetis K20“), we have received the boards and populated a first PCB to verify everything is working properly.

INTRO Robot Remote
The main purpose of this project is to give students a decent platform for learning and for controlling the Sumo robot used in the course:

INTRO Sumo Robot
The other purpose of this project is to enable students for small battery operated project. With the graphical LCD and two wireless options a range of applications is possible, from remote controller to data logger applications.
Board features:
- tinyK20 with ARM Cortex-M4 (NXP K20DX128, 50 MHz, 128 kByte FLASH, 16 kKByte RAM) with optional micro-SD card
- Nordic Semiconductor nRF24L01+ 2.4 GHz wireless transceiver
- Adafruit LoRa transceiver module (optional)
- Buttons: Joystick with 4-way plus middle button, two side push buttons
- Bootloader push button
- Graphical BW LCD (Nokia 84×48 pixels)
- USB rechargeable LiPo battery (different capacity)
- Detachable modules: main processor, LCD, navigation switch, nRF24L01+ and LoRa transceiver
INTRO Robot Modules
Most of the modules have connectors on the bottom side of the PCB: that way the LCD and joystick are the highest components on the top side:
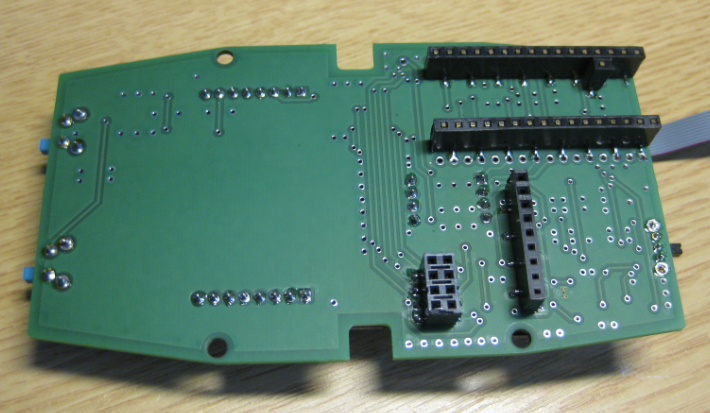
intro-remote-bottom-side
It is possible to use the Adafruit LoRa transceiver module instead of the Nordic Semiconductor nRF24L01+ module. The picture below shows the module connected to the board. The final version will use a right-angle header, the picture below is from a test setup:
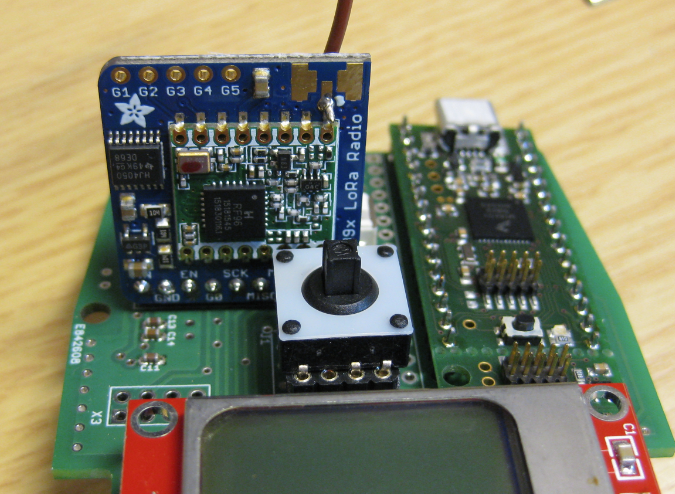
Adafruit LoRa Module
For the LCD I have implemented a simple menu system. The following shows an example top menu:

Top Menu
The currently selected item is highlighted. Items in submenus are indicated with a ‘>’ on the right side:
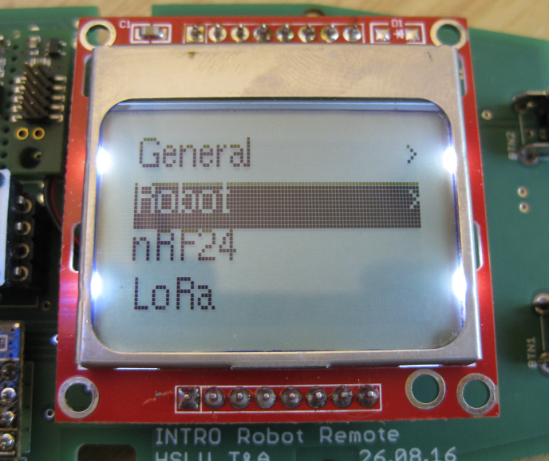
Item 2 in top menu selected
With this I can go down and up again in the menu hierarchy:
Sub-Menu items
Each menu is described with very simply data structure:
typedef struct LCDMenu_MenuItem_{
uint8_t id; /* unique ID of menu item, starting with 1 */
uint8_t level; /* menu level, starting with 0 (root), then increasing numbers */
uint8_t pos; /* position of menu in level, starting with 0 (top position) */
uint8_t lvlUpID; /* menu item level up, 0 for 'none' */
uint8_t lvlDownID; /* menu item level down, 0 for 'none' */
char *menuText; /* text of menu item */
void(*handler)(const struct LCDMenu_MenuItem_ *item, LCDMenu_EventType event, void **dataP); /* callback for menu item */
} LCDMenu_MenuItem;
The menu itself can be stored in FLASH:
static const LCDMenu_MenuItem menus[] =
{/* id, lvl, pos, up, down, text, callback */
{1, 0, 0, 0, 2, "General", NULL},
{2, 1, 0, 1, 0, NULL, BackLightMenuHandler},
{3, 0, 1, 0, 4, "Robot", NULL},
{4, 2, 0, 3, 0, "Remote", NULL},
{5, 2, 1, 3, 0, "Sensors", NULL},
{6, 0, 2, 0, 0, "nRF24", NULL},
{7, 0, 3, 0, 0, "LoRa", NULL},
{8, 0, 4, 0, 0, "Sensors", NULL},
};
The callback is used to configure the menu item or to react on menu selection:
static void BackLightMenuHandler(const struct LCDMenu_MenuItem_ *item, LCDMenu_EventType event, void **dataP) {
if (event==LCDMENU_EVENT_GET_TEXT && dataP!=NULL) {
if (LedBackLightisOn) {
*dataP = "Backlight ON";
} else {
*dataP = "Backlight OFF";
}
} else if (event==LCDMENU_EVENT_ENTER) { /* toggle setting */
LedBackLightisOn = !LedBackLightisOn;
}
}
The implementation is very simple and will be extended over the next days. The current sources can be found on GitHub.
The enclosure for the board is not ready yet. I plan to post pictures when ready next week.
Happy Remoting 🙂

Great job Erich. I am sure the students will benefit from your work.
LikeLike
Hi Bill,
thanks :-). We have to see how it goes. But it is for sure a great improvement compared to the exising lab remote controller based on FRDM-KL25Z.
Erich
LikeLike
I found the chip-on-board-on-board-on-board design a bit amusing—I can understand how it happened, from minimizing design time by reusing existing boards, but I suspect it might have been worth a little time to cut out the Adafruit board and put the underlying RF96 module directly on the remote board. It seems that all the Adafruit board adds is a voltage regulator and level shifter, which are not tricky to design with (unlike radio).
LikeLike
We will use the nRF24L01+ module in the course. We could have designed that module on the board, but these modules cost only around $2 so it was not worth to do an onboard antenna design, and we can re-use existing modules. The LoRa module is different: we plan to use them only for a few boards, so it was not worth to design it into the board or even to use the receiver board. As you said: minimizing design time was the key reason.
LikeLike
Pingback: Enclosure for the Remote Robot Controller with LCD Display | MCU on Eclipse