
First off: The tinyK20 project is progressing fine and is now on Hackaday.io :-).
For a research project we would like to use the tinyK20 to log gyro sensor data. For this I have created a quick-n-dirty project to explore how feasible it is. The tinyK20 has all the pins on the outside of the board, so I’m able to put it on a bread board:

tinyK20 on Breadboard
The tinyK20 has been designed with the data logger as one of its applications. For this, there is a micro-SD card socket on the bottom side of the PCB:

Micro SD Card Socket on TinyK20
The cool thing with the tinyK20 is that I can use it to debug another board. As a bonus, the tinyK20 is able to power the target board trough the SWD cable:
💡 The internal USB regulator of the Freescale Kinetis K20 is able to offer around 100 mA. I use the DC-DC converter on the backside of the tinyK20 to power more than the 100 mA.

tinyK20 debugging another tinyK20
I used a Segger J-Link to get performance data with the Segger SystemViewer.

Debugging with J-Link
Right now I’m logging dummy data. Checking the performance with the Segger SystemViewer for FreeRTOS shows around 20 ms to append 20 bytes to a file (csv format):
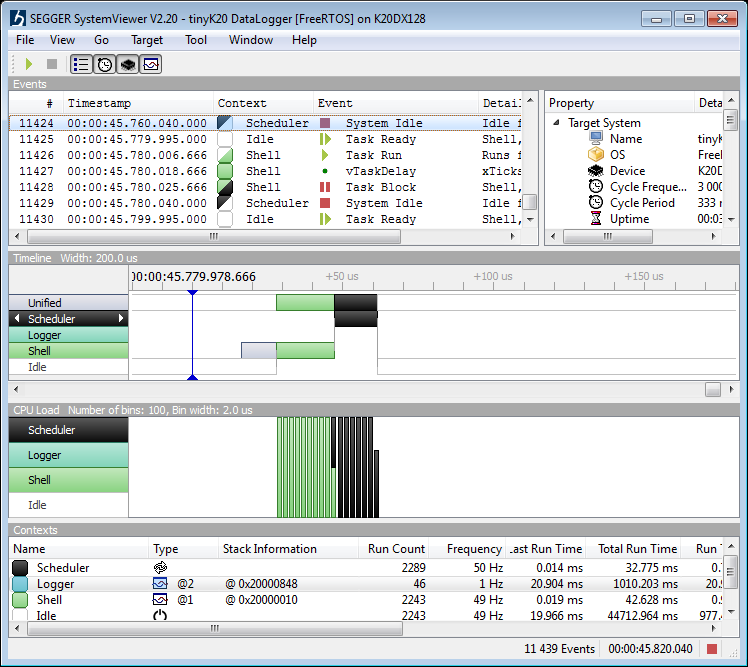
tinyK20 Data Logger with Segger SystemViewer
So far, I have plenty of power to do that data logger application, and I even have a shell with USB and the Segger RTT running :-).
If you want to have a look at that data logger project, it is on GitHub: https://github.com/ErichStyger/mcuoneclipse/tree/master/Examples/KDS/tinyK20/tinyK20_DataLogger
Happy Logging 🙂
Links
- tinyK20 project on Hackaday.io: https://hackaday.io/project/8525-tinyk20-small-uc-board-and-debugger
- tinyK20 articles: https://mcuoneclipse.com/category/boards/tinyk20/
- tinyK20 Data Logger project: https://github.com/ErichStyger/mcuoneclipse/tree/master/Examples/KDS/tinyK20/tinyK20_DataLogger
- Segger SystemViewer: Segger SystemView: Realtime Analysis and Visualization for FreeRTOS

Looks great!
The PDF of the schematics on github does not match the Eagle file, the PDF appears to be a later version. Is github up to date, if so which is the latest version?
LikeLike
Yes, the files on GitHub are not the leatest ones. Need to clean them up and update, probably will find time next week (I hope).
LikeLike
Hi Erich, any updates on the tinyK20 files, yet?
LikeLike
Yes, its ultimate , micro-SD card socket on the bottom side of the PCB and cool thing with the tinyK20 is that I can use it to debug another board , that was good thing.
LikeLiked by 1 person
You’ve done a great job! This is much more flexible than the teensy. Where can I shop for the tinyK20? Does your PCB manufacturer also offer a BTO service for the assembled board?
LikeLiked by 1 person
Thanks :-). We were thinking about providing some of the boards for sale. It is a matter of demand and efforts. So right now there is no shop for it, but certainly could be considered.
Our PCB manufacturer has not offered BTO service. Do you have a recommendation of a manufacturer doing this?
LikeLiked by 1 person
No, not really 😦
But what is about http://www.embedded-projects.net/ they offer such a service as far as I know. Or they can be persuaded to pick up your design into their shop?
Or https://www.beta-layout.com. What is about RS-Components or Farnell didn’t they assist developers to bring their ideas to the market?
LikeLike
What about a Kickstarter project for this, Erich? Then you’d know the quantities up front. Just set your funding limit according to the number of boards you can sell.
LikeLike
Hi Dave,
that board is something we did internally, with very minimal effort. Doing a Kickstarter project is by far something more time consuming. Plus I think the usual Kickstarter fee is 15-20% too. I have shipped some boards to the ones who have contacted me directly. I’ll be at the NXP FTF Technology Forum in Austin in May this year, so I could carry a few boards with me if there is any interest.
LikeLike
Yes, a KS is a bit of work, but if you’re careful with your calculations, you should be able to minimize risk (to losing money from your own pockets) 🙂 In large enough quantities, the tinyK20 could end up being pretty reasonably priced! Well, hopefully you’ll change your mind, or maybe someone else will run the KS for your design! I really like it and might have to order a batch from OSHpark to try it out.
LikeLike
Erich, I’d like to try out the tinyK20. Can you please name your price and payment preference, and I’ll be in touch with quantities? Thanks!!!
LikeLike
Hi Dave,
you can contact me with the email address noted on https://mcuoneclipse.com/about/
Erich
LikeLike
Pingback: How to Add Bluetooth Low Energy (BLE) Connection to ARM Cortex-M | MCU on Eclipse
Pingback: 3D Printed Magical MUFG Capsule to Duplicate NXP Kinetis K20 Boards | MCU on Eclipse
Hi Erich,
It looks like you have the MCU-VREGOUT shorted to the output of the output of the external 3.3V Vreg via R4 in your pictures, is that deliberate?
Cheers
Jim
LikeLike
Yes. R4 is a 0 Ohm resistor you could remove if you would like to cut that line e.g. for energy reduction and running from batteries.
LikeLike
Hi Erich, I think that topology is risky, unless the regulators are perfectly matched current will flow between them.
LikeLike
Hi Jim,
yes, that’s why you can remove that resistor.
LikeLike
Pingback: Fascinating Details of Waveshare E-Paper Displays | MCU on Eclipse
Pingback: First tinyK22 Board with NXP K22FN512 ARM Cortex-M4F | MCU on Eclipse
Pingback: New Concept for 2018 Mini Sumo Roboter | MCU on Eclipse
Pingback: DIY Portable Video Conference, Sharing and Teaching Device | MCU on Eclipse