In “Semihosting with Kinetis Design Studio” I’m using the debugger with semihosting to output text with printf(). But how to use a physical serial connection instead?
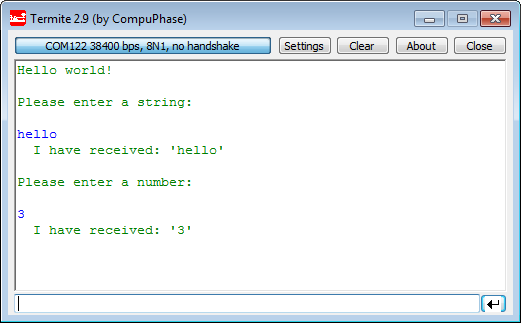
printf() and scanf() in action
This post is about how to enable and use printf() and scanf() with GNU ARM libraries. I show it both for the Freescale Kinetis Design Studio (KDS) and for stock Eclipse Kepler with the GNU GCC ARM Embedded (launchpad) toolchain and libraries. The principles are the same, just the details are different ;-).
Tools Used
I’m using here the following tools:
- Kinetis Design Studio (KDS) V1.0.1 (beta). This Eclipse distribution comes with a custom GNU ARM toolchain (*not* the official GNU GCC ARM Embedded from ARM Inc. on launchpad).
- Eclipse Kepler (see “Constructing a Classroom IDE with Eclipse for ARM“) with GNU ARM Embedded 4.8 update 2. This GNU toolchain and libraries are maintained by ARM Inc. and is the most recent one.
Printf() with GNU Libraries
By default, the GNU newlib and newlib-nano libraries in KDS have semihosting included (at least in V1.0.1 beta which has been released in May 2014). So when I do a printf() or one of its family members, it tries to communicate with the debugger. In order to use my communication channel for input and output, I need to overwrite the following methods of the GNU library:
int _write (int fd, const void *buf, size_t count); int _read (int fd, const void *buf, size_t count);
So if I use printf() in my code, it actually will end up at the _write() function to write the characters. In a similar way, if I call scanf(), it will use _read() to get the data from the input stream.
The interface to both functions is rather simple: the return value tells the caller how many bytes have been written or read. The buf parameter points to a buffer for the data, and count indicates the buffer size.
The concept is both the same for KDS and stock Eclipse with GNU ARM Embedded, but there are enough important details between the two tool chains to describe it separately.
Kinetis Design Studio
Both _read() and _write() functions are already implemented in the library supplied by KDS for semihosting, and they are marked as ‘weak’ functions. That means I can overwrite them with my own application specific functions.
The easiest way to use printf() with KDS is for a Processor Expert project. In that case I simply add the ConsoleIO component to it. And if you do not want to use Processor Expert, you simply can use or copy-paste that code anyway.
❗ Note that things are very different for Kinetis SDK projects. SDK projects is not a topic covered here.
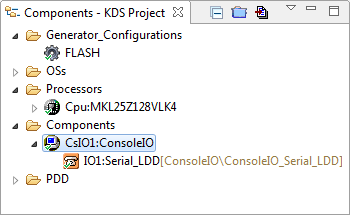
KDS Project with ConsoleIO component
ConsoleIO Settings
With the ConsoleIO component added, I can configure in the component
- If it shall wait until a character is received or not.
- How input (Rx) and output (Tx) new line character sequences are handled.
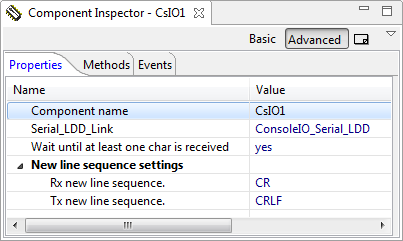
ConsoleIO Configuration
The settings for Rx and Tx new line is important to match the settings used in the host terminal program. With the wait setting I specify that the _read() method will block until a newline is detected.
❗ It is important to note that the ConsoleIO implements the interface to the UART in a polling (non-interrupt) mode.
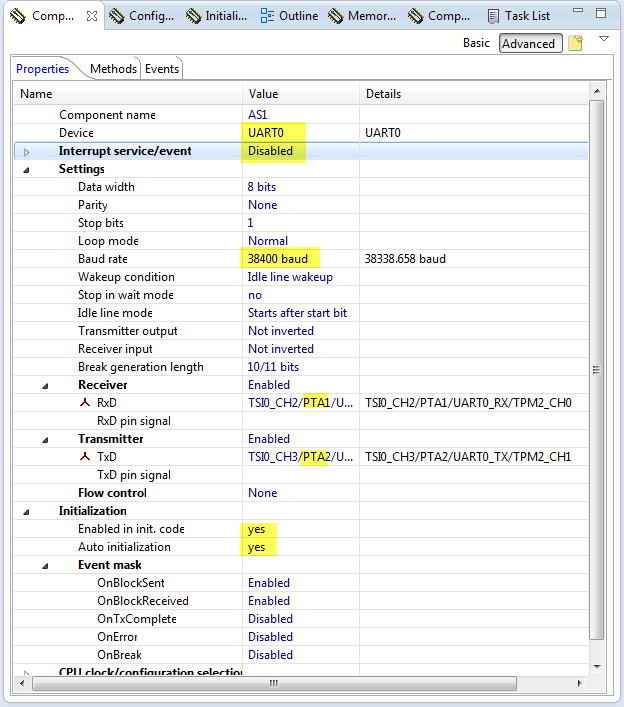
UART Settings
In the Serial_LDD sub-component I configure the hardware settings: which UART to use, the baud rate and the pin settings. As said before, interrupts are not used. The screenshot below shows the setting for the FRDM-KL25Z board:
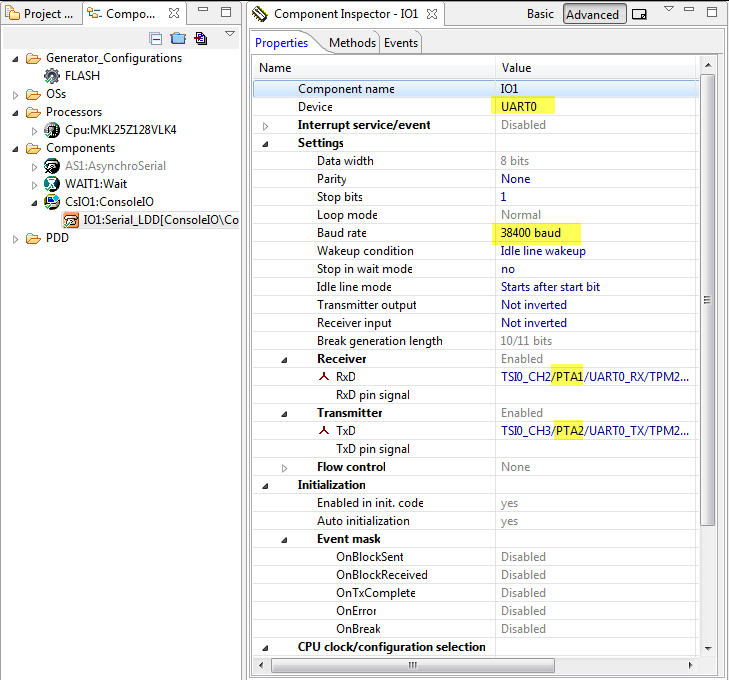
UART Configuration
_read() and _write() Methods
The ConsoleIO component does not show any methods listed, as the _read() and _write() methods are internally used by printf() and scanf(). But I can inspect the code generated with a context menu:
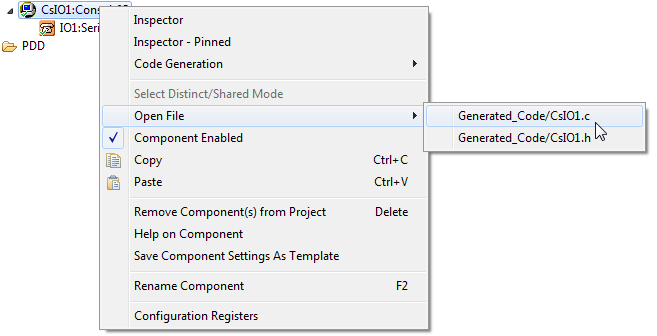
Inspecting Generated Code
And actually that generated code has two bugs (at least with Kinetis Design Studio V1.0.1beta): both functions should return the number of characters read or written.
For the _read() function see my fix at the return statement at the end of the function:
int _read (int fd, const void *buf, size_t count)
{
size_t CharCnt = 0x00;
(void)fd; /* Parameter is not used, suppress unused argument warning */
for (;count > 0x00; --count) {
if ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_RDRF_MASK) == 0x00) { /* Any data in receiver buffer */
/* Clear error flags */
UART0_PDD_ClearInterruptFlags(UART0_BASE_PTR,0x1FU);
if (CharCnt != 0x00) { /* No, at least one char received? */
break; /* Yes, return received char(s) */
} else { /* Wait until a char is received */
while ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_RDRF_MASK) == 0x00) {};
}
}
CharCnt++; /* Increase char counter */
/* Save character received by UARTx device into the receive buffer */
*(uint8_t*)buf = (unsigned char)UART0_PDD_GetChar8(UART0_BASE_PTR);
/* Stop reading if CR (Ox0D) character is received */
if (*(uint8_t*)buf == 0x0DU) { /* New line character (CR) received ? */
*(uint8_t*)buf = '\n'; /* Yes, convert LF to '\n' char. */
break; /* Stop loop and return received char(s) */
}
(uint8_t*)buf++; /* Increase buffer pointer */
}
//return 1; /* WRONG! */
return CharCnt;
}
In a similar way, the _read() function needs to be patched:
int _write (int fd, const void *buf, size_t count)
{
size_t CharCnt = 0x00;
(void)fd; /* Parameter is not used, suppress unused argument warning */
for (;count > 0x00; --count) {
/* Wait until UART is ready for saving a next character into the transmit buffer */
while ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_TDRE_MASK) == 0) {};
if (*(uint8_t*)buf == '\n') {
/* Send '\r'(0x0D) before each '\n'(0x0A). */
/* Save a character into the transmit buffer of the UART0 device */
UART0_PDD_PutChar8(UART0_BASE_PTR, 0x0DU);
/* Wait until UART is ready for saving a next character into the transmit buffer */
while ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_TDRE_MASK) == 0) {};
}
/* Save a character into the transmit buffer of the UART0 device */
UART0_PDD_PutChar8(UART0_BASE_PTR, (unsigned char)*(uint8_t*)buf);
(uint8_t*)buf++; /* Increase buffer pointer */
CharCnt++; /* Increase char counter */
}
//return count; /* WRONG! */
return CharCnt; /* CORRECT */
}
But my change will be overwritten by the next code generation. So to keep my patch, I need to disable code generation with the context menu:
Inspecting Generated Code
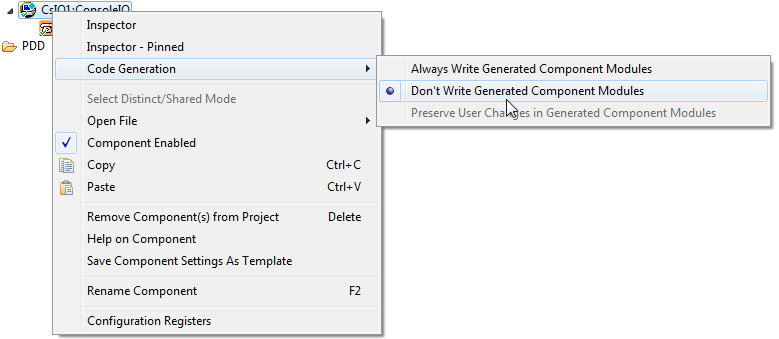
Disabled Code Generation
💡 Once this is fixed in the ConsoleIO component provided by Freescale, of course that patch is not necessary any more.
Test Program
To test the functionality, I use this small program which writes and reads from the console:
#include "Application.h"
#include
void APP_Run(void) {
int value;
char buffer[64];
for(;;) {
printf("Hello world!\r\n");
printf("Please enter a name:\n\r");
scanf("%s", buffer);
printf(" I have received: '%s'\r\n", buffer);
printf("Please enter a number:\r\n");
scanf("%i", &value);
printf(" I have received: '%i'\r\n", value);
}
}
Code and Data Size
As already mentioned in “Why I don’t like printf()“, there is a price to pay. In KDS V1.0.0beta, this means the above simple program needs 40 KByte Flash!
text data bss dec hex filename 39340 2284 1608 43232 a8e0 FRDM-KL25Z_printf.elf
Looking at the linker options, it is using the newlib library, and not the smaller and more efficient newlib-nano. Adding -nanolibc to the linker options is the solution:
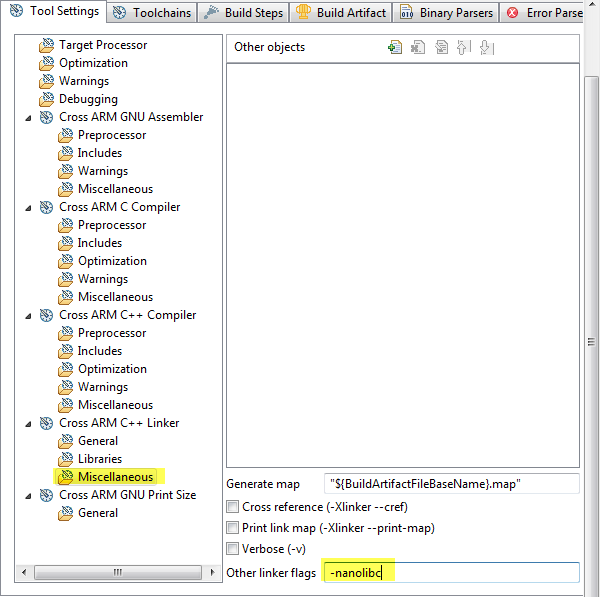
-nanolibc added to linker options
And this indeed helps: the code size is down to below 10 KByte:
text data bss dec hex filename 9884 704 1304 11892 2e74 FRDM-KL25Z_printf.elf
There is one big problem with the printf() and scanf() family of function: they typically use a lot of stack. I recommend to have at least 1 KByte of RAM as stack if using these functions. If you see weird behaviour, try to increase your stack size and see if this helps.
Eclipse Kepler with GNU ARM Embedded
In the Processor Expert Driver Suite 10.4, there is no ConsoleIO component (not sure why?). But this is not a big deal as I can do the same thing as in KDS:
- Adding the Serial_LDD component and configure it (settings shownforFRDM-KL25Z):

Serial_LDD Configuration
- Adding ConsoleIO.c (file name not matters) with the
_read()and_write()functions copied from the KDS version.
#include "IO_Map.h"
#include "stdio.h"
#include
#include "UART0_PDD.h"
/*
** ===================================================================
** Method : CsIO1__read (component ConsoleIO)
**
** Description :
** _read
** This method is internal. It is used by Processor Expert only.
** ===================================================================
*/
int _read (int fd, const void *buf, size_t count)
{
size_t CharCnt = 0x00;
(void)fd; /* Parameter is not used, suppress unused argument warning */
for (;count > 0x00; --count) {
if ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_RDRF_MASK) == 0x00) { /* Any data in receiver buffer */
/* Clear error flags */
UART0_PDD_ClearInterruptFlags(UART0_BASE_PTR,0x1FU);
if (CharCnt != 0x00) { /* No, at least one char received? */
break; /* Yes, return received char(s) */
} else { /* Wait until a char is received */
while ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_RDRF_MASK) == 0x00) {};
}
}
CharCnt++; /* Increase char counter */
/* Save character received by UARTx device into the receive buffer */
*(uint8_t*)buf = (unsigned char)UART0_PDD_GetChar8(UART0_BASE_PTR);
/* Stop reading if CR (Ox0D) character is received */
if (*(uint8_t*)buf == 0x0DU) { /* New line character (CR) received ? */
*(uint8_t*)buf = '\n'; /* Yes, convert LF to '\n' char. */
break; /* Stop loop and return received char(s) */
}
(uint8_t*)buf++; /* Increase buffer pointer */
}
//return 1; /* WRONG! */
return CharCnt;
}
/*
** ===================================================================
** Method : CsIO1__write (component ConsoleIO)
**
** Description :
** _write
** This method is internal. It is used by Processor Expert only.
** ===================================================================
*/
int _write (int fd, const void *buf, size_t count)
{
size_t CharCnt = 0x00;
(void)fd; /* Parameter is not used, suppress unused argument warning */
for (;count > 0x00; --count) {
/* Wait until UART is ready for saving a next character into the transmit buffer */
while ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_TDRE_MASK) == 0) {};
if (*(uint8_t*)buf == '\n') {
/* Send '\r'(0x0D) before each '\n'(0x0A). */
/* Save a character into the transmit buffer of the UART0 device */
UART0_PDD_PutChar8(UART0_BASE_PTR, 0x0DU);
/* Wait until UART is ready for saving a next character into the transmit buffer */
while ((UART0_PDD_ReadInterruptStatusReg(UART0_BASE_PTR) & UART0_S1_TDRE_MASK) == 0) {};
}
/* Save a character into the transmit buffer of the UART0 device */
UART0_PDD_PutChar8(UART0_BASE_PTR, (unsigned char)*(uint8_t*)buf);
(uint8_t*)buf++; /* Increase buffer pointer */
CharCnt++; /* Increase char counter */
}
//return count; /* WRONG! */
return CharCnt; /* CORRECT */
}
Code and Data Size
Checking the code size with the linker option -specs=nosys.specs gives this:
text data bss dec hex filename 54188 2240 1152 57580 e0ec FRDM-KL25Z_Printf.elf
which is even higher than with newlib in KDS. Using the newlib-nano (-specs=nano.specs -specs=nosys.specs) gives
text data bss dec hex filename 10256 128 1108 11492 2ce4 FRDM-KL25Z_Printf.elf
the code size is still a bit higher than in KDS. But the interesting part is that the GNU ARM Embedded library needs much less RAM. And RAM is very much the limiting factor of the application.
Newlib-nano and Floating Point
To use printf() and scanf() in the newlib-nano, more options are needed:
To use printf() with floating point, the following option needs to be added to the linker options:
-u _printf_float
To use scanf() with floating point, a similar option is needed:
-u _scanf_float
Do not add these options, as it adds roughly 15 KByte of code (yikes!).
The other point is: to use printf() with float values, it requires some stack and heap space: so be sure you have enough stack and heap defined. Plus make sure that _start() is called from the startup code to initialize the library functionality.
Summary
To use printf() and scanf() with a physical serial port, I need to implement a _read() and _write() function implementation on the application side. This is easier with KDS and a Processor Expert component for this, but not hard to do in Eclipse Kepler. While the KDS code size is smaller than the GNU ARM Embedded version, KDS needs more RAM. Knowing about _read() and _write() functions means I can do anything with it: instead writing to a UART, I could use it for sending/receiving text over USB, using Ethernet, using a LCD or sending stuff to a printer: it is so flexible that it be used with pretty much anything :-).
Happy Printing 🙂

Pingback: Switching ARM GNU Tool Chain and Libraries in Kinetis Design Studio | MCU on Eclipse
Pingback: printf() for the FRDM-K64F Board and Kinetis Design Studio | MCU on Eclipse
hello Erich,
I create a project with frdm-ke04z use KDS1.1.1 , it appears ” #warning Because RAM size of this device is not enough to fit in the heap requirements of newlib/newlib-nano, startup code is by-passed!” , and then i only write “printf(“hello\n”);” it errors .
About the warning ,what should i do ?
Thank you !
Alice
LikeLike
Hi Alice,
the problem is that the default library delivered by KDS (special GNU library from Somnium) uses needs around 0x400 (1 KByte) heap, even if you are not using the heap. So for devices with less then 2 KByte this really does not work because of that library. In order to link, the startup code in the library is bypassed, and not all the needed structures for printf() are allocated. For a small device like KE04z printf() anyway is a huge overhead/overkill. See https://mcuoneclipse.com/2014/07/11/printf-and-scanf-with-gnu-arm-libraries/. Better consider a more lightweight approach like https://mcuoneclipse.com/2014/08/17/xformat-a-lightweight-printf-and-sprintf-alternative/. Another way would be to use the official standard GNU ARM Embedded (launchpad) tools and libraries with KDS, see https://mcuoneclipse.com/2014/07/11/switching-arm-gnu-tool-chain-and-libraries-in-kinetis-design-studio/
I hope this helps,
Erich
LikeLike
Pingback: Comparing CodeWarrior with Kinetis Design Studio | MCU on Eclipse
Hi Erich. I am trying to get working with a FRDM22F and want to output to the console. The issues is we do not want to use the KSDK. I have set up a project using the K22F board, not using the KSDF, PE and changed the heap size. The project runs but nothing shows up in the console. When setting up the console IO I had to use UART1 not UART0 because I am using the GDB PEMicro for debugging.
Any idea what I am doing wrong?. Is there a better way to get data to the console?
LikeLike
The simplest way is to use PEx and using the UART through the K20/OpenSDA/USB CDC to the host, without printf(). Or use my Shell component which offers functions to print strings and numbers?
LikeLike
Thanks. I found my issue. I was looking at PE and notice the timing was set for the ADC but there was a warning about the ADC clock. The PE project generated and run but communications did not work. Changed timing the warning went away and communications worked.
Looking at the system timing it was obvious that the communications was polling interrupt driven which is very surprising for me.. I looked at IO1:Serial_LLD and see where I can turn interrupts on. Is there an issue with using the interrupt driven IO? I will be trying interrupts shortly.
Thanks for all the support you offer.
LikeLike
Hi Erich,
I am seeing an issue while printing double or float values.
I am using LPC55S69 custom board.
This is the IDE version used => MCUXpresso IDE v24.12
The library used => NewlibNano (no host)
I am able to print the debug messages using “PRINTF”.
I tried to print value of double or float I am just seeing blank message on the console.
Later I just realized that, PRINTF_FLOAT_ENABLE needs to be set to 1, in order to print values of double or float. I set “PRINTF_FLOAT_ENABLE” to 1 in the LPC core.
But as soon I enabled the macro, none of the debug messages are displayed on the console.
I even tried enabling “Enable printf float” option, that also didn’t help.
Just FYI, I have used these format specifiers -> %f, %lf, %.4Lf, %.4f
Also FYI, In the debug mode, I can able to see the values in that particular double variable, only issue is with printing.
Regards,
San
LikeLike
Hi San,
not sure what is wrong in your case, I’ll have to check tomorrow with my board when I’m back in the office.
Erich
LikeLike
I quickly checked today with my board and an SDK (24.12.00) project.
Set library to newlib-nano, changed in the compiler settings the preprocessor setting to PRINTF_FLOAT_ENABLE=1 and enabled in the managed linker script settings the option ‘enable printf float’, and that has printed floats with %f for me.
LikeLike
Hi Eric,
I am wondering, what is different in my environment.
When I enable PRINTF_FLOAT_ENABLE compiler option under settings, when this is set to 1, the code under this flag is getting enabled (Inside this function -> int StrFormatPrintf(const char *fmt, va_list ap, char *buf, printfCb cb))
When I set PRINTF_FLOAT_ENABLE to 1, none of the PRINTF messages are getting displayed, I mean the debug messages are completely blocked.
I am using SDK 2.16.000
Do you think the SDK version makes any difference?
When I started working on my project, that is the SDK version available, so I am using the same.
I have a latest version of SDK (25.03.00), but I am yet to integrate the components from that to my code environment.
Regards,
San
LikeLike
Hi San,
I don’t believe the SDK makes such a difference. But for sure the library does. Are you sure you are *not* using RedLib (which is the default usually)?
The SDK code is what is using the PRINTF() macro/implementation. Have you tried to use a direct call to printf() already?
LikeLike
Thanks Eric.
This is very strange behavior on my setup then. I don’t if I am missing any configurations.
LikeLike
Hi Eric,
My code stack organized into my application specific code, LPC55S69 core and Free RTOS code.
I made sure that the library used is NanoLib only and not the red lib.
Can you please let me know, if I share my workspace for you to review? I tried to do, but I didn’t see any attachment option.
Regards,
San
LikeLike
Hi Eric,
Thank you so much for your time and support.
I didn’t realize that, the other dependent projects pointing to RedLib library and I missed few build configurations too.
With those configuration changes, now I am able to print double value.
Regards,
San
LikeLike
Hi San,
you are welcome! Glad to hear that it is working now.
Erich
LikeLike