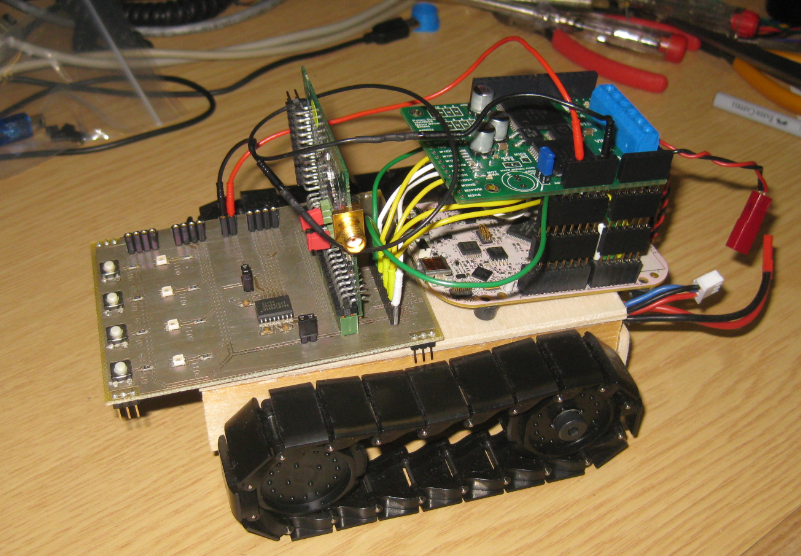
My other robots based on the FRDM-KL25Z use Bluetooth as connectivity. This one is using a Freescale IEEE802.15.4/ZigBee/SMAC module:

Robot with SRB MC13213 Board as Remote Controller
Tracked Robot
Chassis
The chassis is using 2×20 Pololu track links with two sprocket pair and the Tamiya Twin-Motor Gearbox. Two L-shaped aluminium pieces hold the track wheels, with a wood enclosure on top. That way the motors, gears and batteries are inside the compartment:
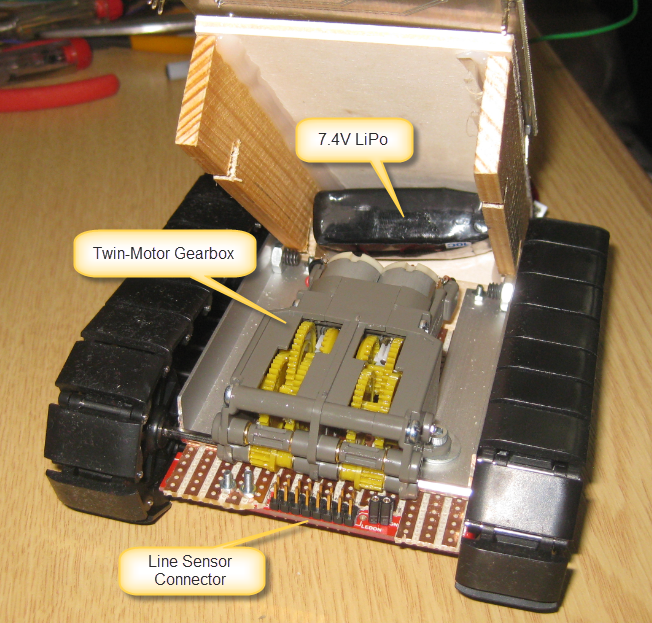
Chassis with Gearbox
Line Sensor
Underneath, there is a line sensor (not connected to the FRDM Board yet) which will enable the robot to do line following:
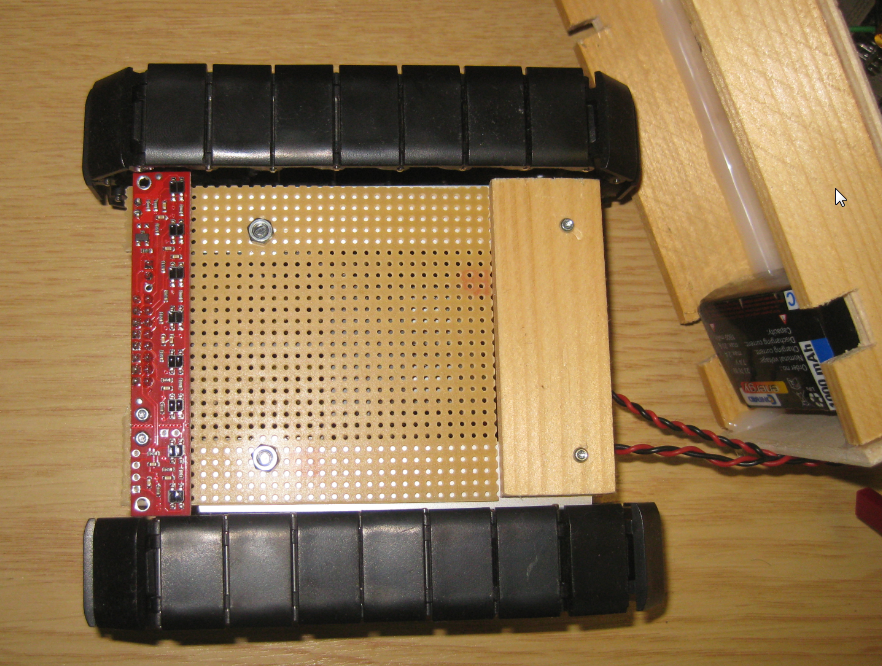
Line Sensor
Motor Shield
The FRDM-KL25Z (white peproduction) board uses the VNH5019 Motor Driver Shield for Arduino.
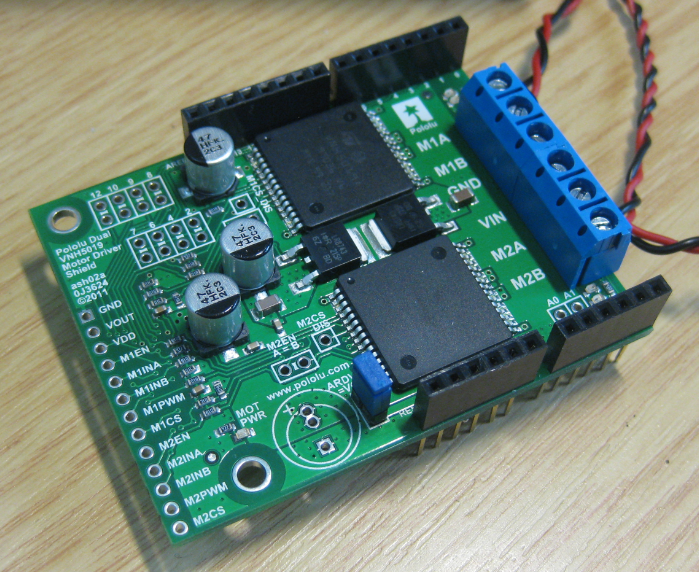
VNH5019 Motor Shield
❗ That motor shield can provide continuous 12A per motor, so way more what is needed for the two motors in this robot.
As the FRDM-KL25Z does not generate the needed 5V from VIN/VBAT, I had to add a small 5V Step-Up/Step-down converter (S7V7F5) on the backside of the shield:
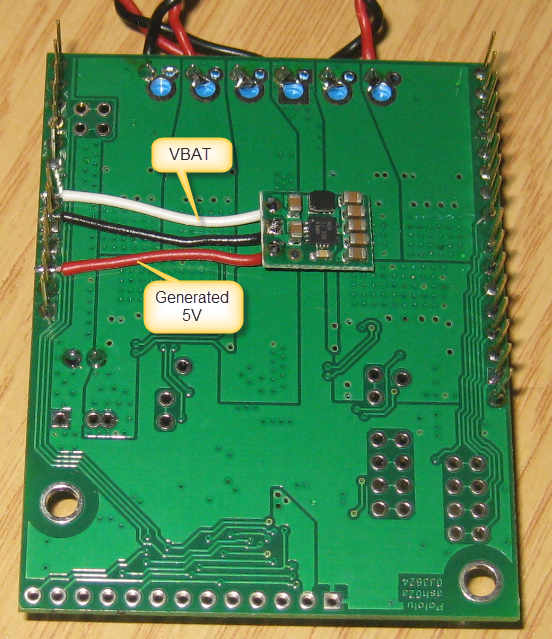
5V Generation from VBAT
IEEE802.15.4/ZigBee Module
I’m using the 1320x-RFC RF daughter card (IEEE802.15.4/ZigBee) which I used in other projects. To keep things simple, I’m using an adapter PCB which I want to replace in a next step.
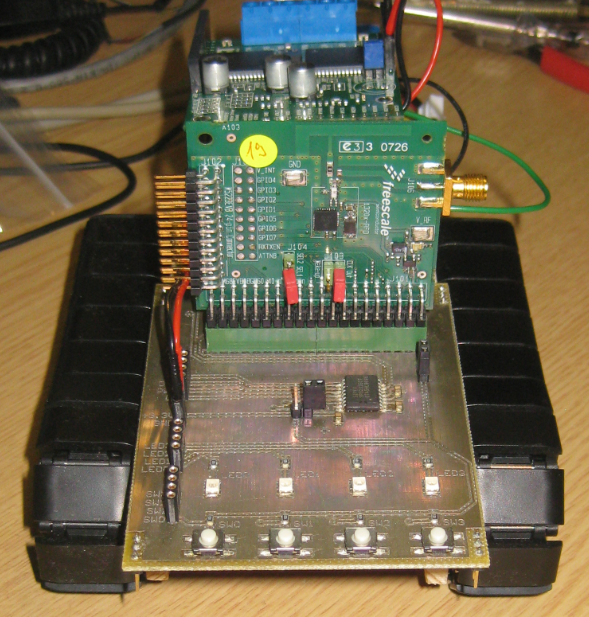
IEEE802.15.4 Module
MC13213 Remote Controller
I can communicate to the robot using the 2.4 GHz band, using the Freescale MC13213 SRB board:
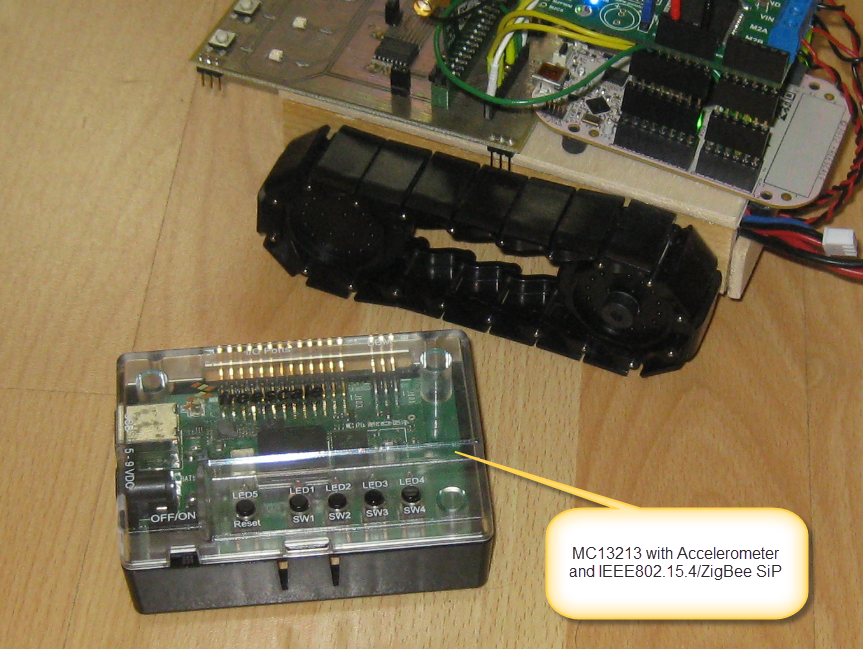
MC13213 as Remote Controller
The MC13213 SRB board features a USB connector so I can use it as gateway from my Host PC to use the Shell on the robot.
Software
Building the chassis needed more time than to build the software. With the help of Processor Expert components it took a couple of hours from project creation up to the state shown in the video below ![]()
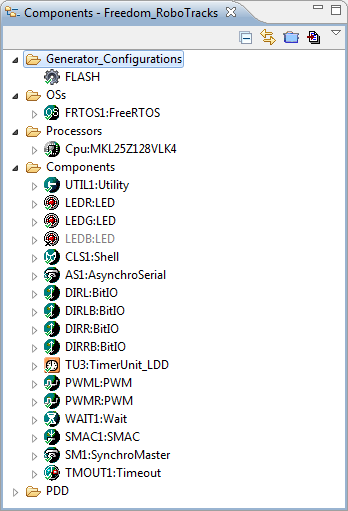
CodeWarrior for MCU10.4 Robot Project
The robot project runs FreeRTOS and the communication SMAC stack, built up from Processor Expert projects.
The MC13213 SRB project uses similar components. It is using the onboard MMA7260Q accelerometer which is used to control the robot:
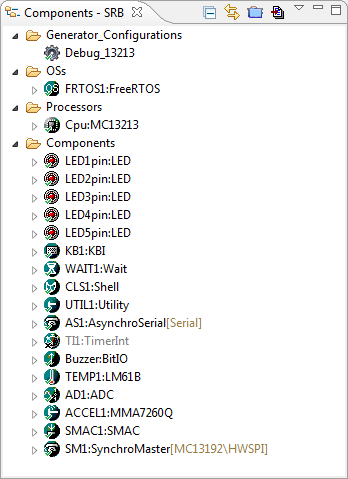
MC13213 SRB Remote Controller Project
Using the accelerometer on the SRB board, it is used to control the robot:
The tracks work very well on a carpet too:
Summary
Yet another robot :-). But this time I have a different connectivity based on IEEE802.15/4 (SMAC) protocol. Having a lot of software in the form of Processor Expert components made it easy to pull together the application. The tracks work very well on carpet, while they do not have enough grip on normal ground if I accelerate too fast. Something to work on. And to work on integrating the line following sensors. And to add servos. And more 🙂
Happy Roboting 🙂

Pingback: Tracked Robot Update: Ultrasonic, Line Sensor and Shell with SMAC 802.15.4 | MCU on Eclipse
Pingback: Mini Sumo Robot Competition running with FRDM-KL25Z | MCU on Eclipse
Pingback: IEEE802.15.4 for the Zumo Robot | MCU on Eclipse