
In “Tutorial: DIY Kinetis SDK Project with Eclipse – Startup” I showed how to create a Kinetis SDK project from scratch. In this post it is about adding the board initialization files. With the board initialization the peripheral clocks and pin muxing is configured.

MK64FN1M0VLL12 on FRDM-K64F
Clocks and Pin Muxing
As outlined in “Tutorial: DIY Kinetis SDK Project with Eclipse – Startup“, up to main() I have already a basic configuration:
- Stack and Heap are defined
- ‘Critical’ hardware like Watchdog/COP and basic CPU clocks are configured
- C/C++ variables are initialized
- Any ANSI library runtime settings are done
But for many modern microcontroller, there is yet another hardware configuration needed, which usually is done from main() as one of the first steps: to configure the clock gating and pin muxing.
‘Clock Gating‘ means that clocks are configured as such that the peripherals used are clocked. By default on ARM cores, peripheral clocks need to be enabled, and accessing a peripheral like I/O pins which are not clocked will very likely result in an exception or hard fault.
The other thing is ‘Pin Muxing’: on modern microcontroller an external pin on the processor package can be used by different peripherals. For example the picture below shows the ‘Processor’ view in Processor Expert. The pin No 7 can be used for I/O, UART, I2S, FTM or even for USB. And it is now configured and routed to PTE6 as I/O pin:

PTE6 Routing
Pin Muxing or Routing can be in many cases changed at runtime, but it is important to configure it properly at the beginning before doing the driver initialization, as the muxin is ‘shared’ between the peripherals and drivers.
SDK Board Files
I’m adding my board to the project with the files in ${KSDK_PATH}\boards:
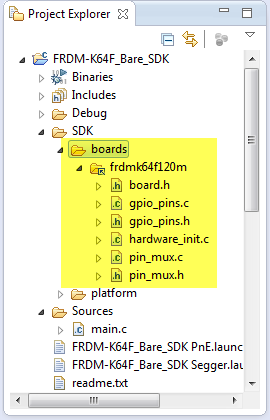
Added board support for FRDM-K64F
And I make sure the compiler knows the include path to the boards folder. But as the board files are using a bunch of other include files of the SDK, I need to add some extra compiler include paths:
"${KSDK_PATH}/boards/frdmk64f120m"
"${KSDK_PATH}/platform/drivers/gpio"
"${KSDK_PATH}/platform/hal/port"
"${KSDK_PATH}/platform/hal/gpio"
"${KSDK_PATH}/platform/drivers/clock"
"${KSDK_PATH}/platform/utilities"
"${KSDK_PATH}/platform/hal/sim"
With this, I’m able to compile and link the board files :-).
Initializing the Board
To initialize the board, I include the header file:
#include "board.h"
and call the initialization function:
hardware_init(); /* initialize the hardware */
My application does now ‘nothing’: it only calls main() and there I initialize the hardware:
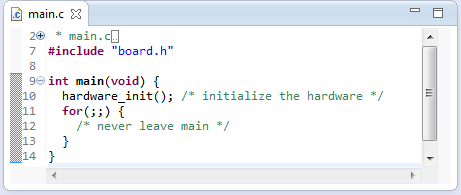
main() with hardware_init()
But it will complain about missing clock_manager_set_gate():

Missing clock_manager_set_gate
This means I need to add the needed files to configure clocks and the SIM (System Integration Module). So I add more files: clock and sim:

Added clock and sim folders
And again, I need to add an include path for the compiler:
"${KSDK_PATH}/platform/drivers/interrupt"
Unfortunately, there is a bug in the current SDK V1.0.0-Beta: fsl_sim_features.h reports that it does not know my correctly specified “CPU_MK64FN1M0VLL12” :-(:
Description Resource Path Location Type #error "No valid CPU defined" fsl_sim_features.h /FRDM-K64F_Bare_SDK/SDK/platform/hal/sim line 279 C/C++ Problem
So I need to add the following to my compiler preprocessor settings to make the compiler happy:
"CPU_MK64FN1M0VMD12"
And with this I can build:
text data bss dec hex filename 17912 2476 260 20648 50a8 FRDM-K64F_Bare_SDK.elf
newlib-nano
Well, that’s a lot of code size! Time to switch to the smaller newlib-nano library. So I add
-specs=nano.specs
to my linker settings:

newlib-nano linker option
With this, the code size gets cut by half :-):
text data bss dec hex filename 8376 152 44 8572 217c FRDM-K64F_Bare_SDK.elf
Now, that 8 KByte (yikes!) code is still a *lot*, given what our application does: it does *nothing* (yet). The reason is how the SDK is architected: it uses a lot of tables and internal data structures, and does a lot of things dynamically (e.g. hardware initialization). Therefore the code (and speed) overhead compared to a ‘traditional’ project is not small. Even ‘pure’ Processor Expert projects are much smaller for ‘doing nothing’ because Processor Expert can just generate the code needed, and does not need to carry on all the extra stuff. The same thing with a Processor Expert project would be less than 4 KByte code!
hardware_init()
But what is hardware_init() doing? Not that much, but a very important thing: to setup the clocks and pin muxing:
void hardware_init(void)
{
int32_t i;
/* enable clock for PORTs */
for (i = 0; i < HW_PORT_INSTANCE_COUNT; i++)
{
clock_manager_set_gate(kClockModulePORT, i, true);
}
/* init the general pinmux */
configure_enet_pin_mux(0);
for (i = 0; i < HW_PORT_INSTANCE_COUNT; i++)
{
configure_gpio_pin_mux(i);
}
configure_i2c_pin_mux(0);
configure_i2c_pin_mux(1);
configure_sdhc_pin_mux(0);
configure_spi_pin_mux(0);
configure_uart_pin_mux(0);
}
The first for loop enables the clock gates (passes the clocks to the peripherals) for the PORT (GPIO) peripherals. I recommend that you use the debugger and step through the code (e.g. go into clock_manager_set_gate(). Then you can see what contributes to the code size).
Next it configures the ethernet pin muxing with configure_enet_pin_mux(), followed by a for loop which does the same for the general purpose I/O pins. As we have two I2C on microcontroller, there are two calls to configure_i2c_pin_mux().
Summary
Before I can run my application code, the microcontroller needs to be initialized properly. Basically this means configuring the pin muxing and clock gates. As this is usually depending on the board or what is attached to the pins, this is named ‘board configuration’ too. The Kinetis SDK has preconfigured board configuration, e.g. for the FRDM-K64F. The configuration is done with the function hardware_init() which needs to be called right after main(). With the Kinetis SDK I can initialize my hardware and board in programmatic way and do my custom board configuration. However, with the way how the SDK is architected, be ready for overhead. For microcontroller with a lot of FLASH like the K64F this does not matter much, but for smaller microcontroller saving every byte is important.
The project is available on GitHub. So what’s next? Blinking a LED!
Happy Boarding 🙂

With the transition from CW to KDS do you think we’ll have board configurations to earlier boards (like the FRDM-KL25Z, FRDM-K20D50M, etc.) or we’ll be stuck in two worlds having to choose the developing environment in function of the target board/microcontroller?
LikeLike
It is the Kinetis SDK which comes with board configuration files, and yes, they have been added for newer boards only for now. I have been told that KL25Z will be added to the KSDK too. But having board configuration files or not does not prevent me to use KDS for earlier boards at all. Such configuration files did not exist for CodeWarrior neither, so no difference for me. The point really is that the SDK itself is putting a sharp discontinuation into the world, and that because of this there are no Processor Expert LDD (or components) and more, only SDK ones. I have many projects for earlier boards which now I cannot move to the new parts (like FRDM-K22F) as with the SDK everything gots incompatible.
LikeLike
Hi Erich,
I think I’m being probably victim of nomenclature (or clashes of!):
I don’t know if it is possible to paste pictures in this comments section, so I’ll try to describe what I’m talking about “board configurations” in CW:
Open Processor Expert->Components Library and in the Categories tab see the first leaf (folder like icon) the “Board Support”, under it you’ll find a board configuration for the available chip (for example if you already opened a Processor Expert project for the MKL25Z128VLK4 CPU you’ll see a FRDM-KL25Z board available and so on.
In general for the CPUs available there seem to be more emphasis in the TWR-… type of boards and the Freedom board is the only one I know of.
Regards,
—
Cesar Rabak
LikeLike
Hi Cesar,
if you install additional Kinetis SDK update packages (they are inside the Kinetis SDK, tools support folder), then more TWR and FRDM boards get added.
LikeLike