
I have been asked this question several times:
“How can I define my own interrupt vector with Processor Expert?”
So I think it deserves a short tutorial, if more than one person is asking this ;-).
My user interrupt in the vector table
Interrupts in Processor Expert: Vectors.c
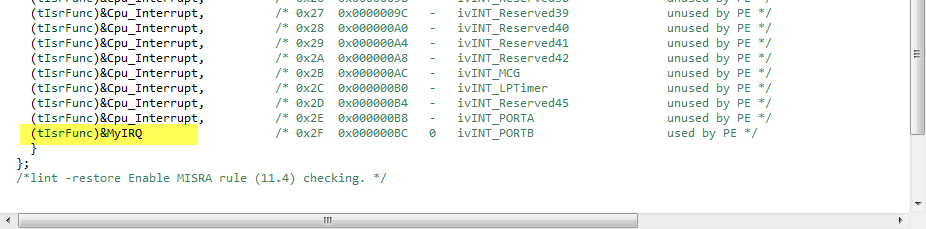
If you are using an interrupt device (SPI, I2C, USB, etc), then Processor Expert cares about it. Processor Expert maintains the vector table But if I want to hook into an interrupt vector myself, I need to tell Processor Expert that. The interrupt vector table is generated as ‘vectors.c’ in the Generated_Code folder.
❗ I’m using in this post screenshots from the newly released Processor Expert V10.4 version, but things apply to earlier versions too. I’m using here an ARM project (Kinetis KL02Z), but things are pretty the same for any other architecture supported by Processor Expert. Additionally, I’m *not* using the Kinetis SDK here, as the way how the SDK deals with interrupts is a different thing, and only would apply to Kinetis.
Vectors.c in Generated_Code Folder
InterruptVector Component
There is a component in the Components Library where I can hook my interrupt into the vector table:

InterruptVector Component in Components Library
That component does nothing else than let me overwrite the interrupt vector in the vector table. So if I add that component, I can configure it to use my interrupt routine. For example if I want to map the Interrupts on port B to my handler, I only need to specify the interrupt and my function name:
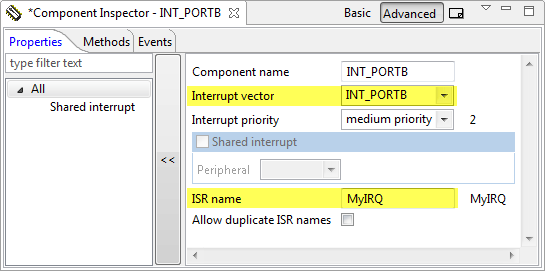
InterruptVector Component Properties
Then I only need to add that interrupt handler (MyIRQ() in my example) and that’s it.
Oh, wait: how to define other properties for that interrupt? I mean I usually can configure to create an interrupt on PortB pin 7 on a falling edge, etc?
The answer is: either I configure all these settings in my code (setting the ‘trigger on’ flags, …), or I use a different component: the Init_GPIO one.
Init_GPIO Component
If I want to configure a pin to create an interrupt on a specific event, I can use the Init_GPIO component found in the Components Library:
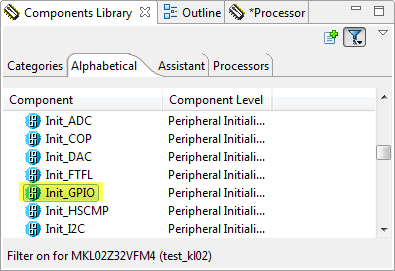
Init_GPIO Component in Components Library
Once I have added this component to my project, I specify the port and pin to be enabled and initialized:
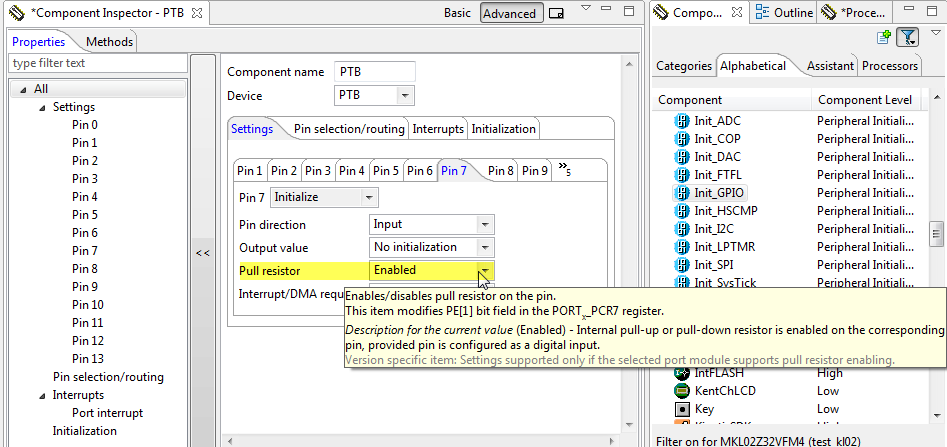
PTB7 Interrupt on Falling Edge
💡 Here I can configure other properties like direction and pull resistor of the pin.
To enable the interrupt and to give my user interrupt function name, I do this in the ‘Interrupts’ section:
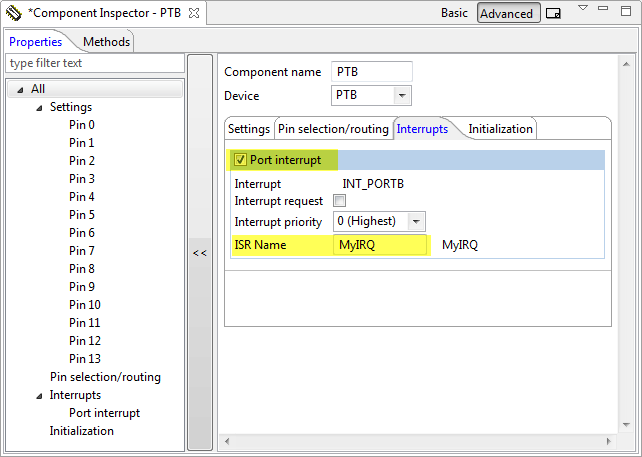
Port Interrupt Settings
Interrupt Code
What is missing is now my interrupt function in my application. An (empty) example would be like this:
void MyIRQ(void) {
/* my interrupt code here */
}
ExtInt Component
Another way is to use the ExtInt Component for external interrupts:
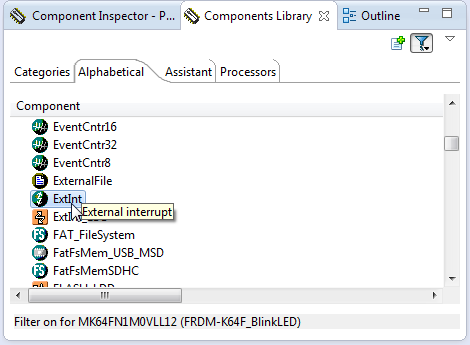
ExtInt Component in Components Library View
The ExtInt component offers methods and events I can use in my application:
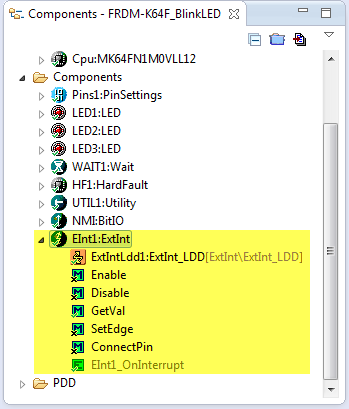
ExtInt Component Methods and Events
In the properties, I configure the interrupt pin and on which edge/level it shall generate an interrupt:
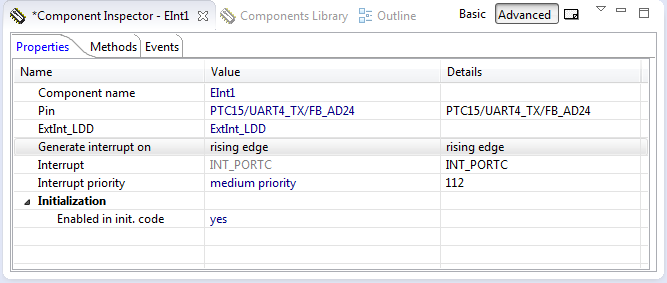
ExtInt Component Poperites
The interrupt itself gets handled in the component itself: all what I need to do is to fill out my user code in the Events.c module:
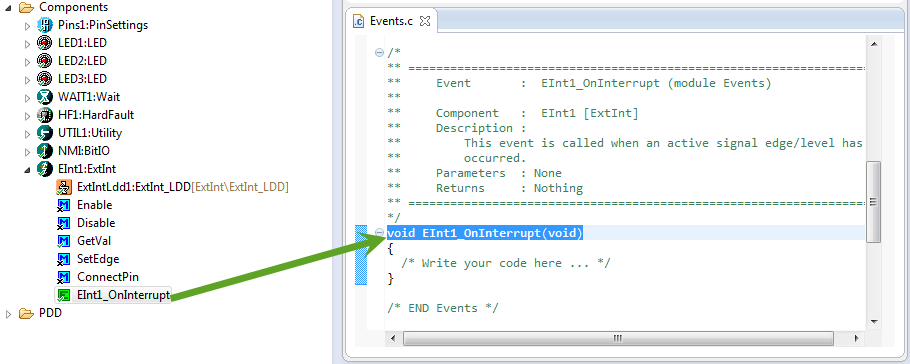
ExtInt OnInterrupt Callback
Summary
Processor Expert takes care about the interrupt vectors and vector table. To define my own interrupts, I can use the InterruptVector component which allows me to add my function name to the vector table. If I want to use interrupts with general purpose I/O pins and want to configure properties like pull-resistors, then the preferred way is to use the Init_GPIO component. The ExtInt component on the other side is a convenient way to act on external interrupt and to configure the interrupt properties.
Happy Vectoring 🙂

Hi Erich,
I am using the same version of processor expert than you with codewarrior for the frdm kl25z, however in the componente library not appear the InterruptVector component. But, the ExtInt appears!
I’ve updated the software!
LikeLike
Hi Matheus,
yes, that depends on the CPU/architecture. There is the InterruptVector component which allows you to hook into any interrupt vector. There is the ExtInt component which allows you to use any interrupt pin (so this is a subset of all interrupts).
Erich
LikeLike
I use a KL15. On my project only pins on PTA and PTD are available for EInt component. Why? I would like to also use PTB, PTC or PTE. Is that possible? How do I configure it?
Thank you!
Gil
LikeLike
Hi Gil,
the hardware only allows external interrupts on PTA and PTD. You cannot use the other ports, as the muxing on the chip does not support it.
Erich
LikeLike
Thank you!
So the KL25 supports all ports, but the KL15 only supports PTA and PTD? Because in your example you use PTC15.
LikeLike
The example shown in this post is the K64F, not the KL25. For the KL25Z128M following pins are available as external interrupt source: PTD2, PTD3, PTD4, PTD7, PTA3, PTA19, PTD1, PTA20, PTA0, PTA1, PTA2, PTA4.
LikeLike
Hi Erich,
Great. Thank you! Now It makes sense, since it’s for the K64F.
Cheers,
Gil
LikeLike
I mean the ExtInt component. Thanks!
LikeLike
Hi again,
I’m doing a project where I get data from an accelerometer with kl25z. The sampling rate of the accelerometer is 640 hz. I’m using FreeRTOS, where there is a specific task to receive data from the accelerometer. There are other tasks, but do not seem to affect anything, because the problem happens in the job itself.
There is only one task with higher priority than the task that reads the accelerometer. The accelerometer generates a high signal on an interrupt pin when data is sampled, and low when the data are read. Basically, the task reads the samples of accelerometer for 2 seconds and then waits for 3 seconds, parallel with other tasks. In an oscilloscope, it can be seen that in the interrupt pin during 2 seconds, a square wave of approximately 640 Hz occurs. In the 3 seconds should read a low value. Observing the oscilloscope, it almost happens … But at a random moment, the value of this pin goes high during the 3 seconds. When this occurs, the program gets stuck at the task awaiting the flag that is set in ISR interrupt. It seems that interrupt dont recognized the rising edge at some point! this can be a hardware issue?
LikeLike
Hi Matheus,
hmm, that’s really hard to tell from remote. Are you using using RTOS functions from your interrupt? If so, carefully set the RTOS interrupt levels, see http://www.freertos.org/RTOS-Cortex-M3-M4.html especially http://www.freertos.org/a00110.html#kernel_priority.
I hope this helps,
Erich
LikeLike
I am not using the RTOS API in the ISRs, I am testing another aplication that send a ramp function to pc via UART, Assynchronous Serial component. The firmware waits for a character from pc to begin send data! But a weird thing happens and I think it’s related with the another problem. One task waits the pc response with that:
while (res != ‘a’)
UART0_RecvChar(&res);
Setting the Interrupt RXD priority with 2 (medium) with ARM priority scheme and the task with priority of 2, FreeRTOS scheme, the program awaits a flag that never comes. But, when I set the task priority to 1, the program receive the char!
How I know the relantionship beetween the ARM priorities and the FreeRTOS tasks priorites?
LikeLike
The RTOS (and the tasks) run with the configLIBRARY_LOWEST_INTERRUPT_PRIORITY (‘RTOS Interrupt Priority’ in the component settings). Usually this should be the lowest (hardware) interrupt priority of your system. On ARM cores: the higher the number, the lower the interrupt priority. If you are using an Freescale Kinetis M4, then this would be 15, for a M0+ this would be 3. The SysTick interrupt runs with this lowest priority, and therefore the tasks too. Inside that, the RTOS has its own task priorities: and here the higher the numbers, the higher the priority.
I hope this helps.
LikeLike
It helps! I think that configLIBRARY_LOWEST_INTERRUPT_PRIORITY is just for define what task can set a priority! I think that the kernel priority was defined in configKERNEL_INTERRUPT_PRIORITY!
I will continue in my task!!! 😛
Thanks very much!
LikeLike
Hi again Erich!
Sorry for bothering you again, but I need to solve the accelerometer problem.
I will be more precise in my explanation now!
The interrupt generated by the accelerometer is connected to pin PTD4 with maximum priority (0), active on rising edge. In this ISR interrupt, a flag is set one!
The kernel was configured with the lower priority (3). A task kernel compares if the value of the flag is set to be able to continue!
However, the task gets stuck in that sentence!
What would be the reason for a higher priority, external interrupt does not occur?
Thanks
LikeLike
Erich,
The way I understand it, I can set one single ISR for a whole port – which is, one function for all pins in that port. Assuming I have multiple pins in that port, and I want interrupts raised for each of them, how can I find out which one triggered my ISR?
Thanks,
Cristian.
LikeLike
Hi Cristian,
in the ISR, you need to read the status of the pins to find out which one triggered the interrupt.
Erich
LikeLike
Perfect, thanks!
LikeLike
Hi Erich,
I’m new to Processor Expert, and this is probably a stupid question, but I’m not sure where to put my Interrupt Code, if I enable the Interrupt on a GPIO Pin.
Thanks,
Jamin
LikeLike
Hi Jamin,
well, that depends what component you are using. If using the ExtInt component, then this component has a method OnInterrupt(). Code for it gets created into Events.c, and there you can add your code. Processor Expert will set up the vector table for you, it will call the interrupt service routine inside the ExtInt component and will call your OnInterrupt() method in Events.c.
I hope that makes sense and helps,
Erich
LikeLike
Thank you!
If I use the ExtInt everything works fine 🙂
But if I’m trying to use the Init_GPIO Component from the Components Library, Processor Expert will set up the vector table as well, but I’ve to call the interrupt service routine and create a MyIRQ methode, (correct?)
And I don’t know where I’ve to call the IRS and put that methode.
LikeLike
Hi Jamin,
if using the Init_GPIO component, enable the interrupts for the port (Interrupts > Port interrupt > Enable). There specify an ISR name (e.g. MyPORTA_ISR). If you generate code, it will add that MyPORTA_ISR entry into the vector table. All what you have to do is now to implement that function MyPORTA_ISR in your application code.
LikeLike
Hi Erich,
Sorry for bothering you again!
If I implement a MyPORTA_ISR Function in the main.c or in the Events.c it isn’t called correctly.
Maybe you could send me an example, on how to implement the MyPORTA_ISR?
LikeLike
What do you mean with ‘not called correctly’? Is it called or not?
The implemenation might look like this:
void MyPORTA_ISR(void) {
/* reset interrupt flag here */
/* do whatever you need to do */
}
LikeLike
Hy Erich,
It is not called.
But for now the ExtInt component is doing the job.
Thank you for this tutorial and your support.
Jamin
LikeLike
Hi Jamin,
then problably some of the settings to trigger the interrupt are maybe not correct. Anyway, you have a working solution now 🙂
Erich
LikeLike
Hi Eric! Good tutorial. I’m to do the but to USB CDC. I noted that this olect doens’t work with USB because the FSL_USB_STACK should manage the interrupt. But it’s not working to me.
Could you give some tips about usb interrupt?
LikeLike
Hi Julio,
you might have a look at one of my tutorials around FSL_USB_Stack component, e.g. https://mcuoneclipse.com/2014/12/27/usb-with-the-freescale-frdm-k22f-board/. The thing is that the Init_USB component will allocate and define the interrupt for USB.
I hope this helps,
Erich
LikeLike
Thanks Erich, I khow this tutorial (excellent too). But in this tutorial you aren’t using interrupt but pooling. You call de the rotine in the code. Does is it right?
I would like manage the USB by interrupt.
LikeLike
Hi Julio,
the FSL_USB_Stack is using interrupts. The interrupt will place the data into a ring buffer where data can be read from the application code (outside of the interrupt context).
Othwerwise you should have a look at the SDK v2.0 USB stack code.
Erich
LikeLike
Erich,
I wanted to issue a strong word of warning for anyone using the EXTINT component.
In my project I did not select the “Enabled in init. code” because I did not want the interrupt to fire until after some data structures had been initialized. Later when I tried to use the Enable() function to enable the interrupt it didn’t work. But it did work if I used that init checkbox. This seemed odd so I looked at the generated code. It turns out that PE ignores the “Generate interrupt on” setting if you don’t check the init checkbox. When you call Enable() it doesn’t actually enable the interrupt. In order to get it to work you have to first call SetEdge(). The big problem here is that SetEdge() actually enables the interrupt all on its own BUT it doesn’t set the UserEnabled flag to true. This means that the interrupt is allowed to fire but the component ISR ignores it and thus doesn’t clear the interrupt. Now your system is stuck. Very very bad.
The SetEdge function needs to be modified to verify that UserEnabled is true before configuring/enabling the interrupt. Otherwise it should only update the private IrqConfig variable with the new setting. Then the Enable() function can subsequently be called to update the UserEnabled flag and configure/enable the interrupt.
This leads me to another concern. In the Enable() function, the UserEnabled flag is set AFTER the interrupt is enabled. Since interrupts aren’t forced to be globally disabled, this can potentially lead to the same lockup situation described above.
Eric
LikeLike
Hi Eric,
I think I have used that component always with ‘enabled in init’, so I was lucky not to see what you describe. I have checked the implementation on a K64F, but here in the ExtIntLdd1_Enable() it *does* configure the edge:
PORT_PDD_SetPinInterruptConfiguration(PORTC_BASE_PTR,
ExtIntLdd1_PIN_INDEX, PORT_PDD_INTERRUPT_ON_RISING);
So it might be a difference with the microcontroller or Processor Expert version you are using. However, I see the same problem with the UserEnabled flag which can lead to a problem ;-(.
As for what you want to accomplish: I did something similar what you wanted, but this way:
– Enabled in Init code is turned on
– In the CPU settings, I have interrupts turned off. So that the PE_Low_Level_Init() does not enable interrupts before jumping to main().
– in main then I have interrupts disabled. Here I could disable as well the ExtInt interrupts if I like to have them turned on later on.
– then turn on interrupts (EnableInt() of CPU component)
that might be a better approach for you too?
Erich
LikeLike
Erich,
It’s intriguing that the two implementations are different. I’m using KDS 3.2 to design for a MKL16 on a custom board.
In ExtIntLdd4_Enable() I see this:
PORT_PDD_SetPinInterruptConfiguration(PORTC_BASE_PTR, ExtIntLdd4_PIN_INDEX, DeviceDataPrv->IrqConfig);
The problem is that ExtIntLdd4_Init() does this:
DeviceDataPrv->IrqConfig = PORT_PDD_INTERRUPT_DMA_DISABLED;
Thanks for you suggestion. I wasn’t able to find an explicit setting in the CPU component to globally disable interrupts. Are you accomplishing this by inserting code into “Build Options->User Initialization->User code before PE initialization”?
Thanks!
Eric
LikeLike
Hi Eric,
for the Cortex-M0+ the setting is under the CPU component, Properties, Initialization priority (just after ‘Clock settings’).
Hint: you can search for properties with this trick: https://mcuoneclipse.com/2013/03/03/search-in-processor-expert-component-properties/
LikeLike
Eric,
I tried using the search you referenced. Interestingly it does not work in KDS 3.2.0. I click on the search result and it does not jump to the component setting. It seems to work fine in my old Kepler-based IDE I built using your guide. I tested this using “?LL” query in your post.
That being said, even in my old IDE, the “Initialization priority” does not seem to have a result and I can’t find it it in the list. I even tried creating a K64F project (to match you) and still didn’t have any success. I did make sure I’m using the “Advanced” filter.
I can work around it without this setting but I find it intriguing that there seems to be a discrepancy in settings we both have available.
Eric
LikeLike
Hi Eric,
Wildcards like “?LL” work fine on my side (Windows 10 with KDS V3.2.0).
I’m using the ‘classic’ (no tabs) view (https://mcuoneclipse.com/2014/06/20/switching-between-tabs-and-no-tabs-ui-in-processor-expert/).
I’m wondering why things are different for you too.
Erich
LikeLike
Erich,
Well I feel sheepish now. I’m using tabs view but you have to click the “All” option at the top of the properties box to see this setting. It isn’t called out explicitly like the other settings. In classic view is very prominent.
Thanks for your help!
Eric
LikeLike
Hello Erich,
I am working with some asynchronous interrupts and one of them is the uart interrupt which has the smaller prioriy, so I am worried about not receving any message from the uart. Also I am worried about the lecture of the ADC. Is there any way to control this asynchronous interruption events?
Thanks for all,
Iñaki
LikeLike
Hi Iñaki,
I assume you are working with an ARM Cortex type microcontroller? In that case, you need to make sure that the priority of the UART (and ADC) are high enough soe they are not blocked (too much interrupt latency). For the UART (AsynchroSerial) there is in the component a ring buffer (send and receive buffer size): they are ring buffers, filled by the interrupt. So if your UART interrupt is high engough, it will fill in the Rx characters regardless what other things are running, up to the buffer size. Usually I have the buffer size say 64 characters long.
About the ARM Cortex-M interrupt system: I wrote a series of articles about it (towards FreeRTOS), but the same applies if you just using the hardware (and no RTOS): https://mcuoneclipse.com/2016/08/14/arm-cortex-m-interrupts-and-freertos-part-1/
I hope this helps,
Erich
LikeLike
Hi Erich,
I am using the KL25Z128. The problem is that I have three interrupts to measure the cadence (r.p.m.) that have the highest priority (asynchronous interrupts). The priority is to have a good measure of the cadence (the interrupts are activated in a few ms all the time). So I am a little bit worried about not taking other interrupts like Uart, ADC, buttons of control,… How I can manage this?
Thanks for all,
Iñaki
LikeLike
Hi Iñaki,
that should not be a problem:
make your cadence interrupt(s) the highest priority. Keep these interrupt service routines as fast and small as possible.
So if they do not block the interrupts for longer than the time for the UART to receive a character, there is no problem.
Keep in mind that the interrupt controller on the ARM Cortex-M supports interrupt nesting (as outlined in the above article(s)), so if your UART interrupt is running with lower priority, it can be interrupted by the higher urgency ones (which is a good thing).
Erich
LikeLike
Hi Erich,
I was speaking with a coworker and he says the same us you are telling me. The cadence interrupts have to be as fast and small as possible, the doubt we have is that if we have an interrupt of cadence running and another interrupt (button) is activated during the interrupt of cadence is going on, that interrupt is lost? or ones the interrupt of the cadence is finished the other interrupt is done? we have to manage some interrupt flag in order to check if it is activated? I am using the Extint component for the interrupts in KL25Z.
Thanks for all your expert help,
Iñaki
P.D.: My coworker is a big fan of you. He recommended my this amazing blog.
LikeLike
Hi Iñaki,
I appologize for my late response.
If you run a higher urgency interrupt, it will mask any lower urgent interrupts. Masking means that the masked interrupt will interrupt the already running interrupt service routine, e.g. your button interrupt. But this does not mean that the event is lost. The button interrupt hardware will set a ‘pending’ bit in the interrupt hardware for that button. And as soon as the higher urgency interrupt service routine has finished its work, it will be able to trigger the interrupt for the button. So it is not lost. However, typically there is just one bit for for each interrupt event (button, USB, UART, etc): so if there would be two button events during the higher urgency interrupt execution, then only one event/bit would be stored. So you only would have an interrupt for the first button press, but not for any more unless your interrupt service routine for the button is able to handle that first event and to set back that bit.
I wish you could attend my lectures around nested interrupts :-).
I hope this helps,
Erich
PS: Say ‘thank you to your coworker’. I will be at Embedded World in Nürnberg 14.-16. March 2017 🙂
LikeLike
Hi Erich,
Don´t apologize, you are always so fast!
What you have commented is very interesting i will continue reading here the nesting interrupts articles. Now I am reading the FreeRTOS but i think that we don´t needed for our application, but it is also very interesting 🙂
I would like to go to the Embedded World in Nürnberg and speak with you (also i wish if i had had a teacher like you in the university), but i think that my boss has another point of view 🙂
My coworker and I thanks you for this brilliant Embedded world blog 🙂
Iñaki
LikeLike
Hi Erich,
I have implemented interrupt base key detection on kinetis K10 series microcontroller.
I am facing a problem. On pressing a key, sometime device hangs and resets after watch dog timer reset.
In ISR , semaphore is released (posted).
Just for testing, I commented semaphore post statement and made ISR empty. Still I am facing device hang issue.
Any guess? why this is happening?.
Thanks and Regards,
Rohit Khele
LikeLike
Hi Rohit,
are you using the _FromISR() version from that ISR?
You are only allowed to use FreeRTOS API calls with _FromISR() in the name from interrupt service routines.
Erich
LikeLike
Hi Erich,
Thanks for reply.
I am using Micrium OS III.
ISR for external interrupt PX_WEST_OnInterrupt() is call by four level fuction call as below.
PE_ISR(PX_CPU_ivINT_PORTA) -> ExtIntLdd3_Interrupt() -> ExtIntLdd3_OnInterrupt(DeviceDataPrv->UserData) -> PX_WEST_OnInterrupt() -> PX_WEST_OnInterrupt()
All these functions are from PE drivers for external interrupt.
If I skip function call by 2 level and do the following way then device didn’t hang
PE_ISR(PX_CPU_ivINT_PORTA) -> ExtIntLdd3_Interrupt() -> PX_WEST_OnInterrupt()
Thanks,
Rohit K
LikeLike
Hi Rohit,
I have not used Micrium OS for a long time, and I only have used the version II (not the version III). I guess it has something to do with how Micrium OS is dealing with interrupts, but this is out of my knowledge for version III.
LikeLike
This was pretty helpful, I’m trying to use the SPI0 in slave mode and the automatic generated code was put in Events.c as well, which was not apparent at first. Now I understand the typical usage in the help file a bit better.
LikeLike
Thanks, glad to hear that it was useful for you.
LikeLike
Hi Eric,
I’ve taken over a project that uses PE and FreeRTOS for K22F512 (same as used on Freedom Board). No SDK is used. I’m able to build and run a blinky app on a FRDM-K22F using KDS. I have all your PE components, so it was fairly easy to implement.
However, I now want to add an interrupts with defined priorities on PORTB (or SW3). The examples all use the SDK calls (e.g. NVIC_SetPriority() ). Of course, these don’t exist outside of the SDK.
So can I use the same PE methods I’ve used in the past for servicing interrupts with FreeRTOS? For example, the Init_GPIO component. Also, am I allowed to access GPIO ports directly without causing a fault under FreeRTOS.
(I also noted that adding the FreeRTOS component removes Vectors.c and replaces it with Vectors_config.h with a list of all the interrupt vectors. Hopefully that won’t matter.)
I’ll also be adding tickless method as I need to remain in low power mode most of the time and will use the RTC for wake-ups. There is an example of this in the SDK, but again, can I use PE components instead of SDK function calls?
Thanks
LikeLike
Hi Brad,
not sure if I understand your case. But you can add things like NVIC_SetPriority() to the PEx generated code too.
And I’m using the same PE methods both for bare metal and with FreeRTOS: the RTOS only needs the SVCall, the PendSV and the SysTick interrupts.
And I do have tickless idle mode running that way too.
I hope this helps,
Erich
LikeLiked by 1 person