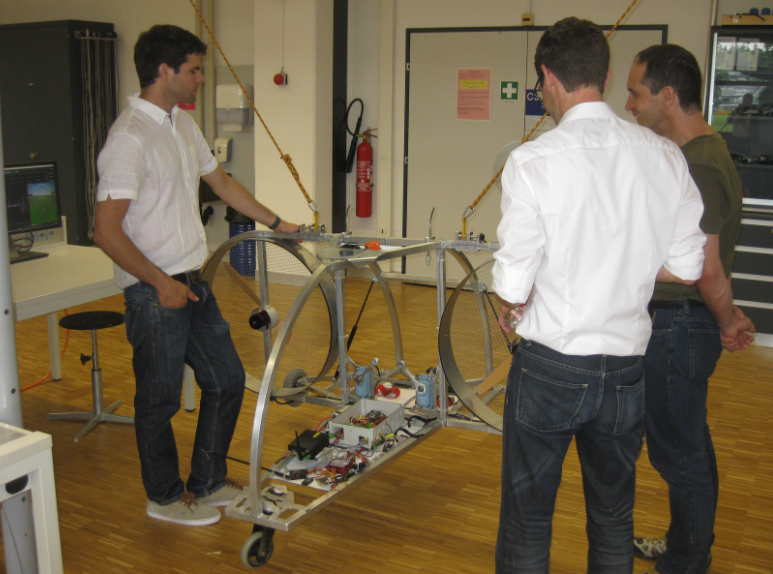
Yesterday Friday afternoon, the students at the Lucerne University of Applied Sciences and Arts in Horw showcased their last semester project work to the public at the university. There were many, many interesting projects, so here are a few to give an idea what has been accomplished …

Part of the Exhibition Area
In several rooms, students presented their work with posters and demonstrations.
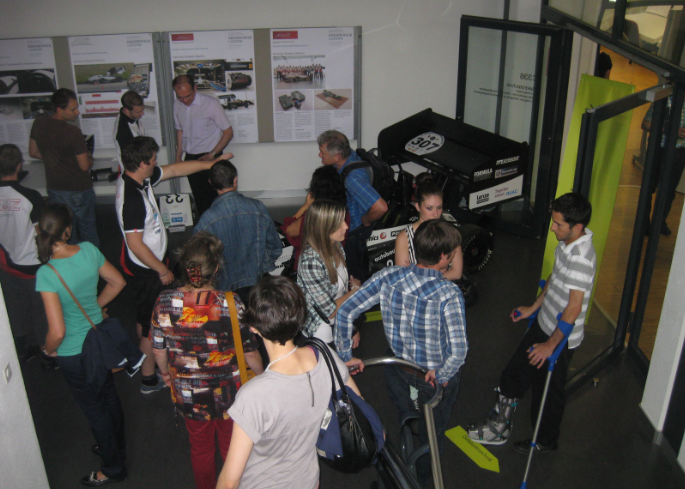
Packed Formula Student Area
Interestingly, many projects used the Freescale Freedom boards, either in the first design phase, or even in the final project stage. In earlier years there were Arduino and mbed boards, and now they disappeared. Talking with students about this, they told me that the Processor Expert components and library on GitHub was the decision factor :-). It seems that the students finally have learned from the mbed and Arduino failures, both from their own experience and from their peers. I’m happy to see that they learn and are now using the right tools for the problems they have to solve ;-).
With this said, below is a collection of projects presented. With a few exception the projects are documented in German, and available in the university library (sorry, not online yet). But I try to describe the projects briefly so you get an idea. Featured projects (in the order they are described below) with the student names:
- Elevator Status Indication: Zumsteg David
- Web Server for Linear Motors: Studhalter Daniel
- Formula Student Electric: Aebli Michael, Giger Pascal, Heller Morris, Studer Simon
- Wind Speed Transceiver: Schär Manuel
- Cable Car Derailing Localization: Vogel Florian
- PX4 UAV: Schuler Carlo
- DMX Constant Current Dimmer: Brechbühl Jan
- CubeSat Payload: Geisseler Dominik
Elevator Status Indication
This one is a subproject in a much larger one for a ‘next generation elevator system’. This board with a Freescale K20 processor to visualize the status of an Elevator system. A FRDM-K20 board was used for the prototype, then a custom board has been designed. The white connectors on the left are going to different high current LED based displays. The flat cable connectors on the lower right are digital inputs (24V) and interfaces to the elevator motor sensors.
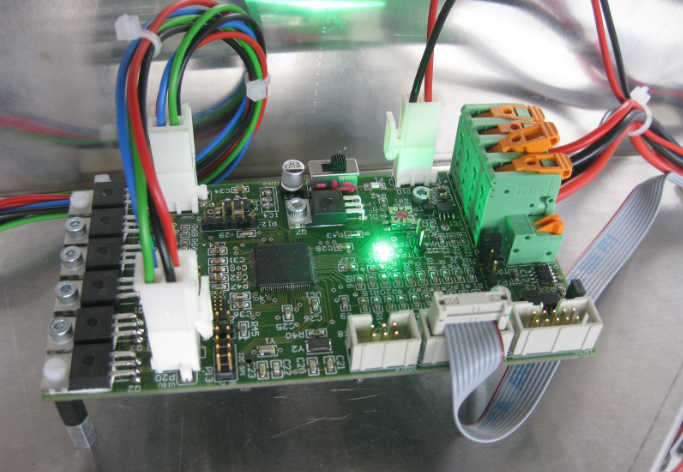
Elevator Status Indication Board
1:4 Model of Elevator
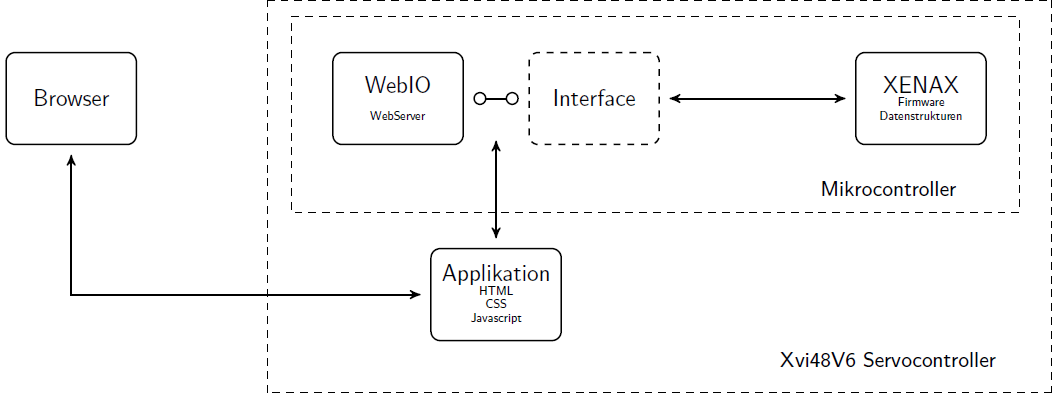
Web Server for Linear Motors
To configure and control a highly accurate linear LINAX motor, a web server has been created which is using latest browser and web technologies. The web server runs on the controller, with a host browser (PC, iOS or Android) can be used to configure and run the linear motor (or a system of motors).
WebServer
Formula Student Electric
A highlight (of course 🙂 was the Formula Student Electric project. As ‘grimsel’ is needed for testing all day this week, the previous year car ‘julier‘ was present at the show which was the winner of the last year competition. See “Formula Student Electric “grimsel” Testing in Alpnach” about the current car under test.

Formula Student
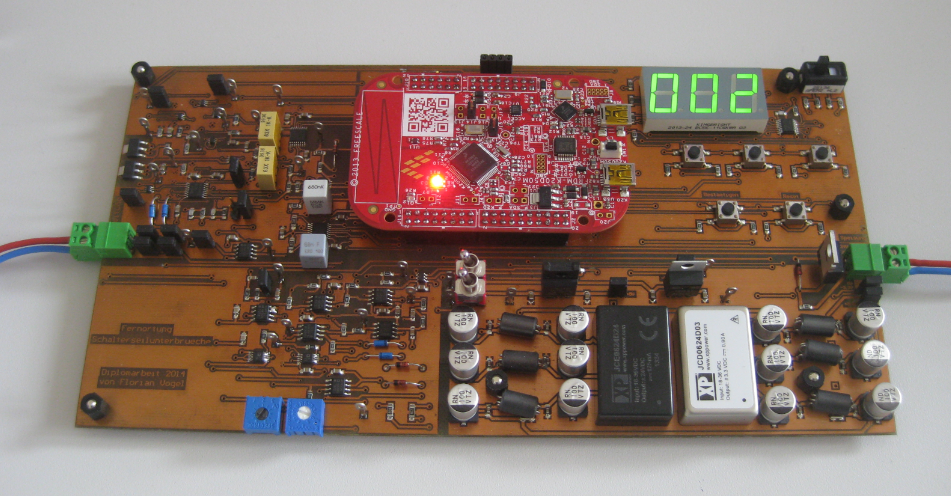
Wind Speed Transceiver
System to measure the wind speed on the masts of cable car systems, using the FRDM-K20 board. On the cable car there are wind sensors, and that data needs to be transmitted to the ground stations. Direct-Digital-Synthesis are used to generate the signal to be transmitted.
Wind Speed Sensor System
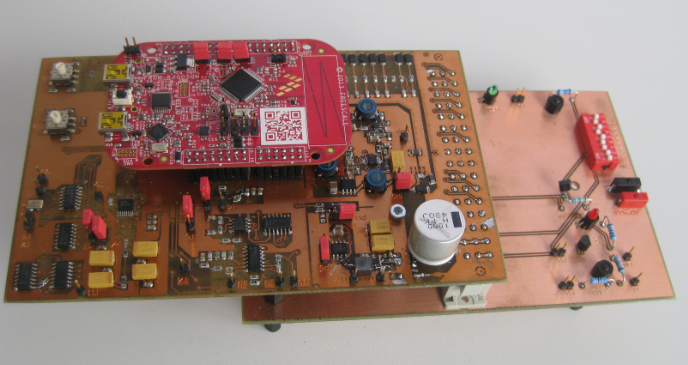
Cable Car Derailing Localization
Cable cars have special systems to detect and signalize a derailing of the cable on a mast. Usually, it is a kind of on-off switch indicating that the cable is derailed, but not where. This system makes a measurement on the signal cable to find the position of the derailing. A Freescale FRDM-K20 board with an ARM Cortex-M4 is used to do all the signal processing.
Cable Breaking Detection
PX4 UAV
The Unmanned-Aerial-Vehicles are always a hot topic. A very interesting autopilot system is the PX4 Autopilot, with the ETH Zurich as driving force behind it. It is open source software and hardware, and has an ARM Cortex-M4F from STMicroelectronics on it (168 MHz, 256 KByte RAM, 2 MByte FLASH). The point here is not much about the microcontroller: the point is that much more than the microcontroller, the software and tools are key. So not the hardware is the decision factor any more, it is the community with software and tools.
UAV System
UAV Electronics
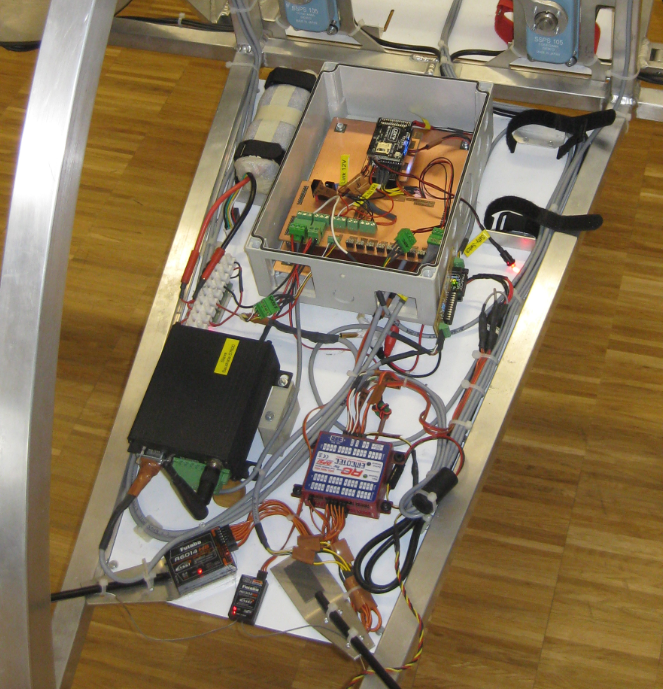
DMX Constant Current Dimmer
DMX (Digital Multiplex) is bus system used for stage lighting and effects. But it can be used in a home or industrial environment too, especially with more and more LED lamps being used. This project implements a DMX system able to dim DMX nodes controlling the current of each node. The nodes are using the FRDM-KL25Z board.

DMX Constant Current Dimming System
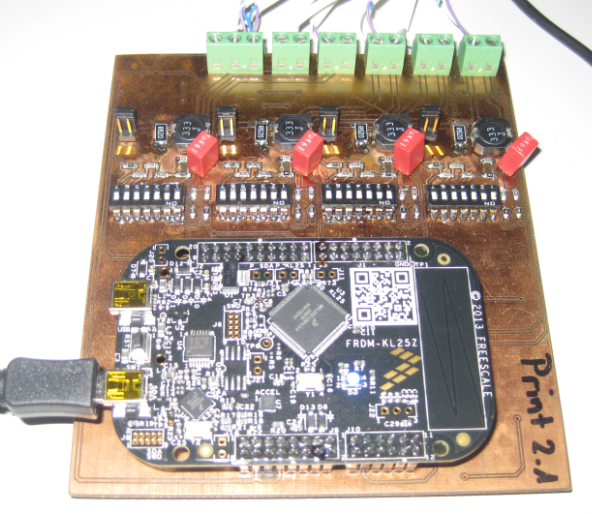
DMX Node
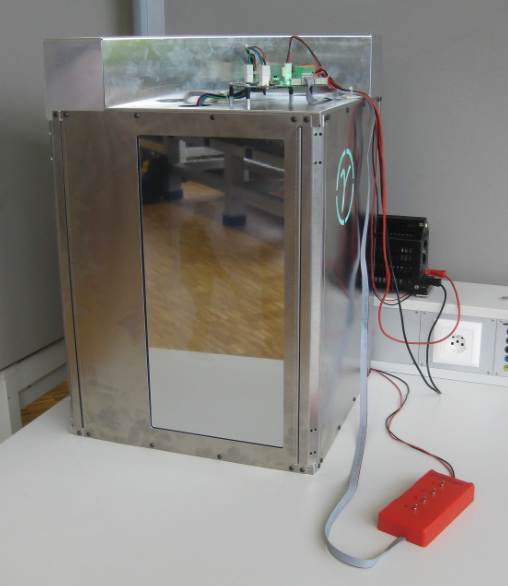
CubeSat Payload
Soon we will launch our own CubeSat to Space :-). Together with the ETH Zurich and EPFL Lausanne we are building a 10x10x10 cm satellite which will have several GPS Sensors on it. For this we are building the ‘payload’ board which manages the GNSS/GPS receiver signals and builds the framework for the scientific experiment which calculates the position of the satellite in space. As we need to do rigid testing on the ground (we cannot travel up to space to fix something!) an extensive test framework has been created. To feed the system with GNSS receiver data, the system has added multiple GNSS emulators. In the picture below you see four of these GNSS emulation systems with SD cards, using the FRDM-KL25Z board and a data logger shield (see “Arduino Data-Logger Shield with the FRDM-KL25Z Board“). The Payload system is using an ARM Cortex-M3 Giant Gecko from Silicon Labs and is used in other CubeSat projects. A Freescale HCS08 GB60 is used in the test system to emulate the communication board, and the ground station is emulated on a laptop.
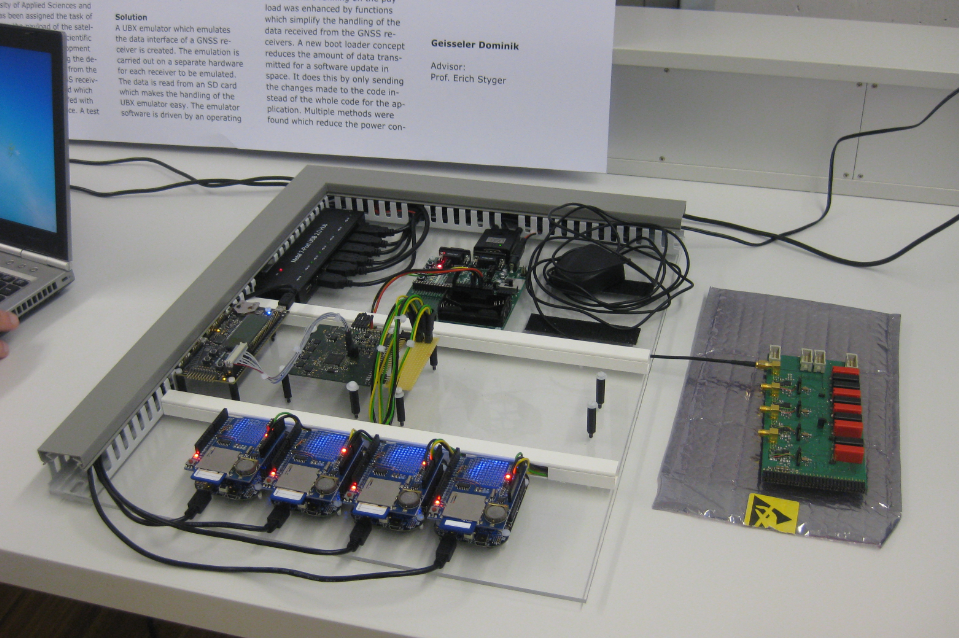
CubeSat Payload Test System
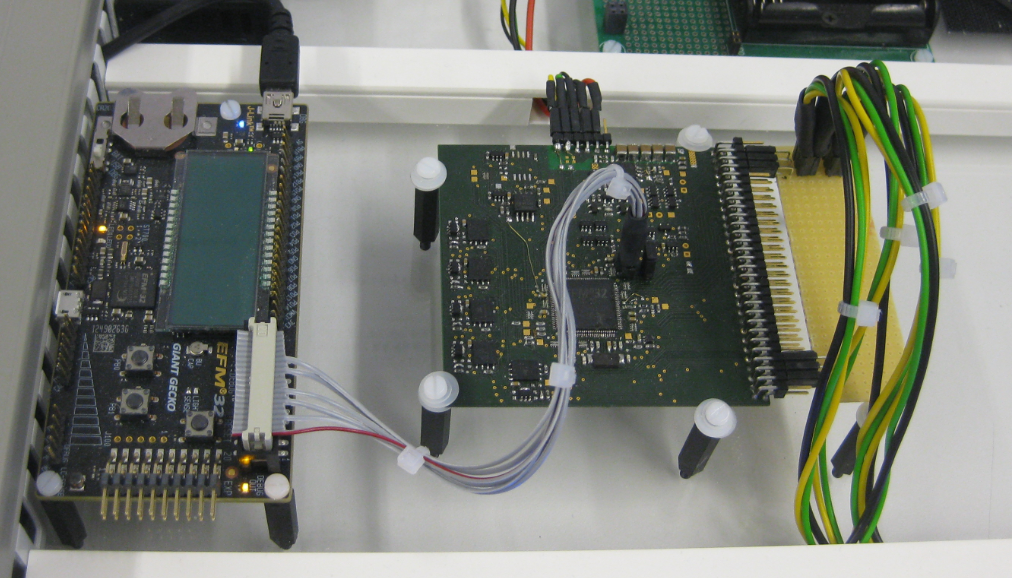
Debug Board (left) with Satellite Payload Board (right)
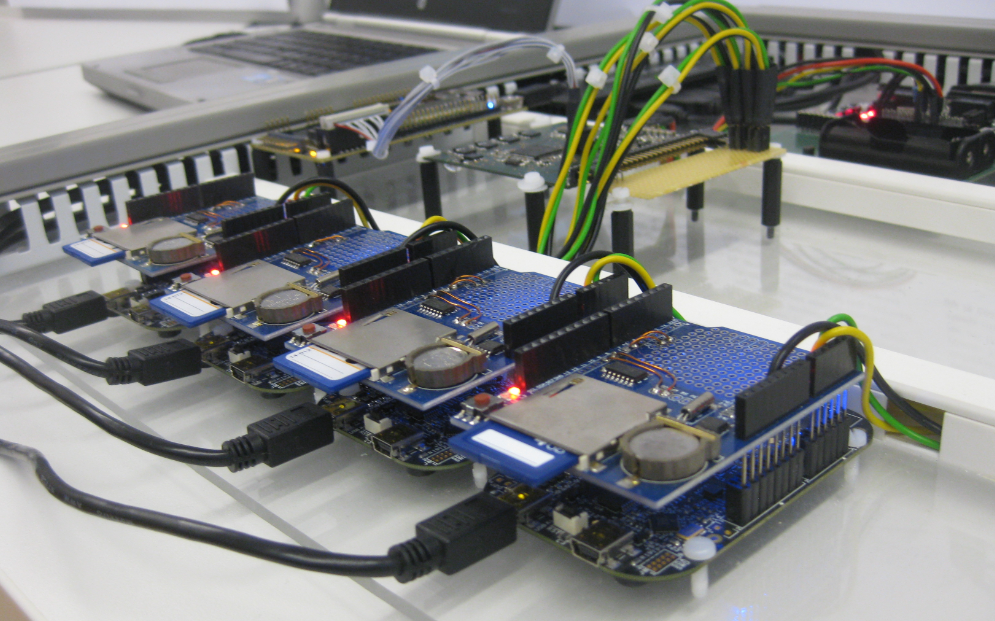
Four GNSS Emulators based on FRDM-KL25Z
Summary
Lots of great projects, and many with great potential to end up in a follow-up project. With a few exception, all projects are using an ARM Cortex-M (with one project using the ARM Cortex-R) in one or the other way. So here as well ARM is dominating the embedded world. If that’s good or bad, the future will tell. But definitely I see a move from ‘hobby’ tools like mbed and Arduinio IDE to ‘real’ software and tools. Nothing wrong about ‘hobby’ tools, they are very useful if used for the right problem. The other trend I see is that cheap and inexpensive hardware boards like the Freescale Freedom board are increasingly used for ‘proof of concept’ designs. For sure they are *not* suited or intended for the final product, but the availability and inexpensive nature of such boards saves the students a lot of time: so instead spending a lot of time in layouting and manufacturing their own processor board, they can focus on the software part. The other trend I see is that Processor Expert projects are used for many projects: here again the Processor Expert component and approach helps the students to focus on the application part, and not on the low-level drivers.
Happy Exhibiting 🙂

Erich,
Well done. The students are putting thought into their projects to solve problems. Really happy that all the work you put into PE has not been in vein.
LikeLike
The cubesat sounds very interesting. Will it collect any data other than its position? How will the data be recovered? Will it be broadcasting on any of the amateur radio bands? How long is it expected to stay in orbit? Will it just be tossed out a door and float around until the orbit disintegrates, or will it be put in a container with similar projects?
Will it be on the International Space Station? If so, would it be illegal to put a tiny tiny microphone on it? (Maybe it could listen to the astronauts as they are playing cards with the little green men from mars. :-0 )
LikeLike
GNSS data is the primary data. But there are auxilary data like temperature and battery data. The data will be processed by the ARM core on the board. It has a up and downlink, so we can send commands and get the data (preferred the processed data, as the downlink budget is very limited, as very limited power available). Power is produced by the solar cells on all sides, so not much solar energy we can harvest. It is expected to be in orbit around 3-5 years. New regulations mandate that things have to come down after some time to avoid more junk in space ;-). The rocket we can use has not been allocated yet, so still waiting on a flight slot. It is a one unit device, and several devices get put into a container (usually 3×1 container) and then pushed out to space at the destination level. So yes, it will be tossed out of that container door, and then float around. The device has an internal stabilization based on the earth magnetic field. So no, it will not be at the ISS, but I’m sure if there are little green men from mars in our orbit, we will not be able to detect them 😉
LikeLike
What frequency will it be broadcasting on? Will the data be encrypted? What kind of antenna and receiver will collect the data? Will others be able to receive and display the data? Will the cubesat be geostationary or travel across the sky? Being an amateur radio operator, I would be interested in capturing the data too. How hard might it be to do that?
LikeLike
Have a look at http://swisscube-live.ch/Home/RadioAmateurs, we will use something like this. The uplink will be encrypted. For the downlink we are looking into *not* using AX-25, as we need more bandwidth. The satellite will not be geostationary and will travel around the globe twice in 24h. Things are still not finalized, and a lot of details need to be solved until launch 🙂
LikeLike
After rereading your response, I gather that the only time the cubesat will broadcast is when it receives a code to do so, thus saving battery life. My reason for asking for the details was because I was assuming it would be broadcating all the time. My misssteake.
Nevertheless, at what power will it be broadcasting and at what frequency?
Thanks
LikeLike
It is planned to engage worldwide amateur radio stations if possible. The challenge is to have enough power for the communication. I need to chcck tomorrow the exact frequency bands (there are different bands for Tx and Rx), but the design shall allow radio amateur (HAM) participation if possible.
LikeLike
Hi Erich,
thank you for the interesting post. The DMX dimmer project look very interesting to me. Is there a place where I can read more about it or look at the code?
Thanks.
Best regards,
Panayot
LikeLike
The report is in German, so not much use for you I think. The code is based on the Freescale DMX implementation, see http://cache.freescale.com/files/microcontrollers/doc/app_note/AN3315.pdf and http://cache.freescale.com/files/microcontrollers/doc/user_guide/LGHTNG_RD_UM.pdf
LikeLike
Pingback: Campus Horw and Mount Pilatus | MCU on Eclipse