
I should have known it better, and I always teach my students that they should take the environment into account. And you know what? This time it was me who missed following that rule.
But from the beginning: For the Freescale Technology Forum (FTF) I brought 4 different Zumo Robots to show developing with the Freedom board and Processor Expert. Clark (thanks again, Clark!) has built and brought the Sumo Dojo, and I brought the bots:
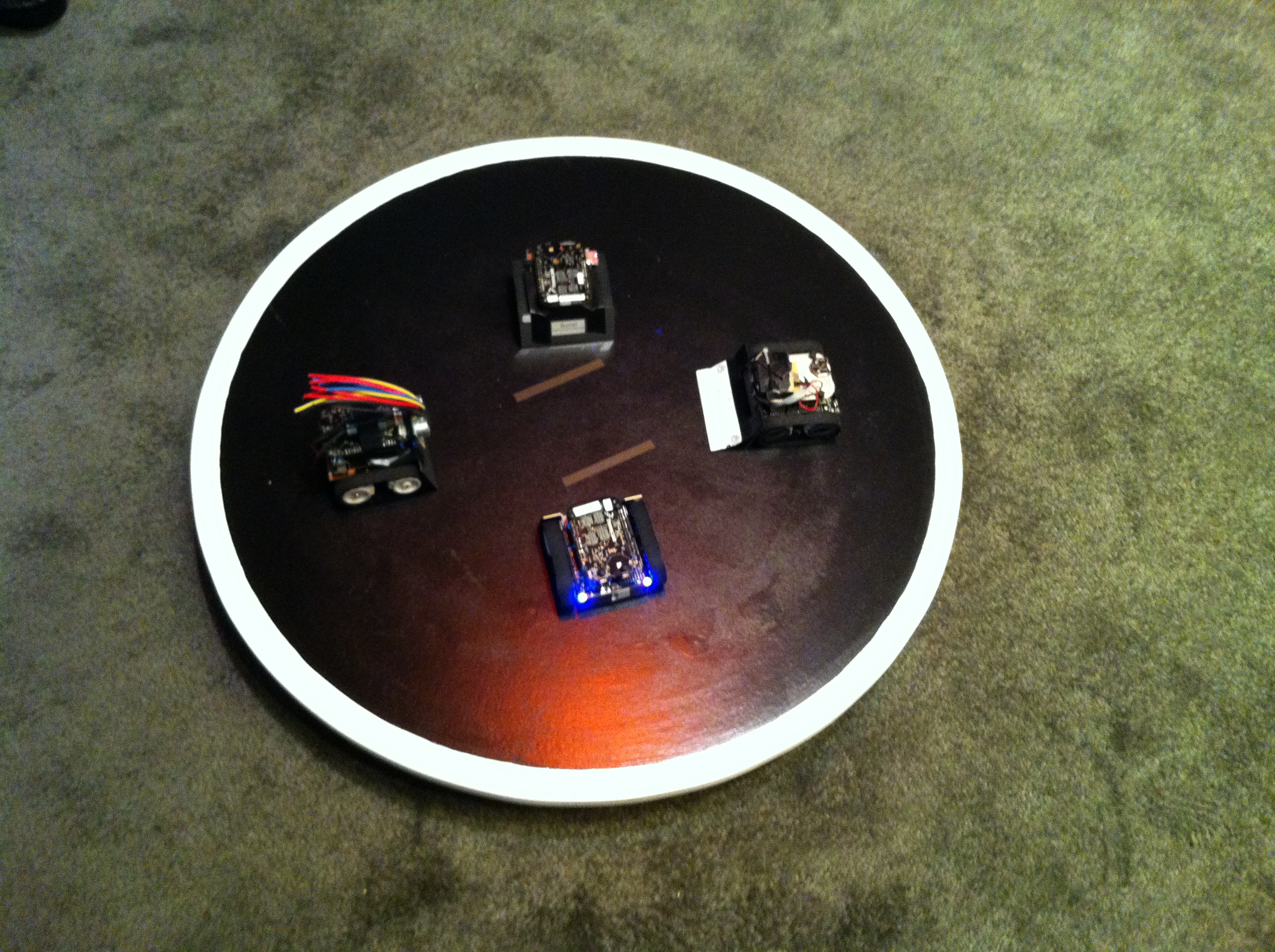
Four Zumo Bots at FTF
I had tested them in advance, and they were working fine. However, on stage, two of them behaved in a strange way: they were making wild turns, driving backward instead forward, etc.
So I took them off stage and debugged them to see what is going on. But everything was working fine again somehow. So I put them back on stage, and again: they were running around like crazy. Hmm, after some trial and errors, I narrowed it down to the optical wheel sensors do not work correctly. I knew that dirt and dust impacts their performance, but they were nice and clean. But then I found out that when I keep the robot with my hands, it was working properly. But as soon as I remove my hand, things went crazy again. Until I realized that I was covering the optical sensor with my hand. Then a look up to the ceiling of the exhibition hall: they had arrays of really bright RGB LED’s for illuminating the area! And that light source impacted badly my optical sensors as they the light was able to reach the sensors 😦
Well, after the source of the problem was identified, I quickly fixed it with black electrical tape which protect the sensors inside the sprocket wheels:
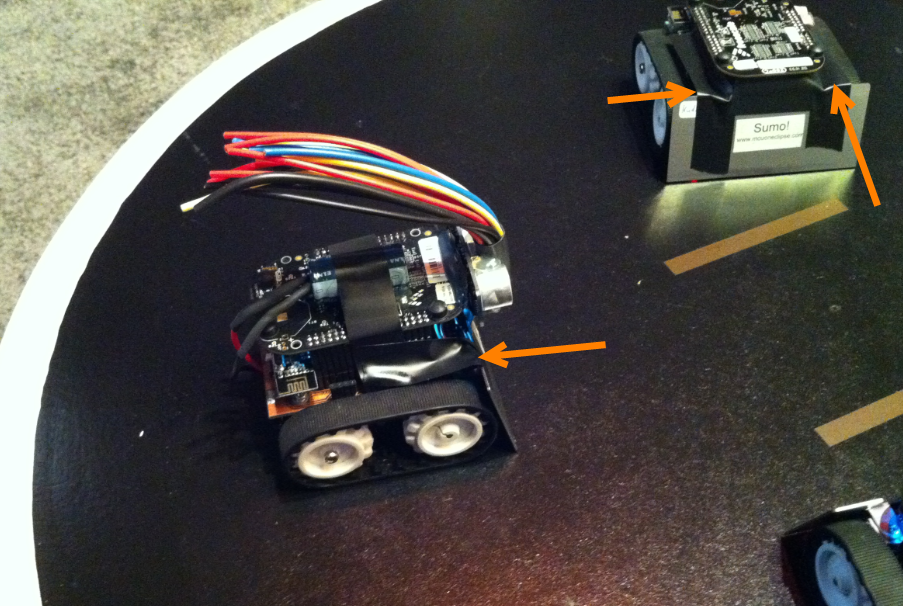
Protected Optical Encoders from Ambient Light
And with this, the bots are happily pushing each other 🙂
Summary
Optical infrared sensors are very sensitive to ambient infrared light. The fact that the sensor work in on environment, does not mean that shielding is enough. Protect them from ambient light as much as possible. And yes: I need to obey my own rules better 😉
Happy Shielding 🙂

Well at least Clark wasn’t the cause. That has been the only problem I have found with the optical sensors including the high end or lets really say the expensive ones. Unless the sensor pack is in a IP65 or better case they can act out. At least you found it so you could continue and electrical tape is the #3 or the ‘Duck Tape’ world.
LikeLike
Yes, Clark was not the issue, it was my not-forward-thinking. And I agree with you: IP65 would solve it to, unfortunately that would mean in this case the whole bot needs to be IP65. Well, let me think about that ;-). And electrical tape is probably something every engineer needs to carry in his pockets anyway 🙂
LikeLike
Pingback: Joystick Shield with nRF24L01 driving a Zumo Robot | MCU on Eclipse