
The 40 new PCB’s for the new Pololu optical encoders arrived (see “Processing the Pololu Motor Shaft Encoders“) 🙂

40 Encoder PCBs arrived

Encoder Top Side
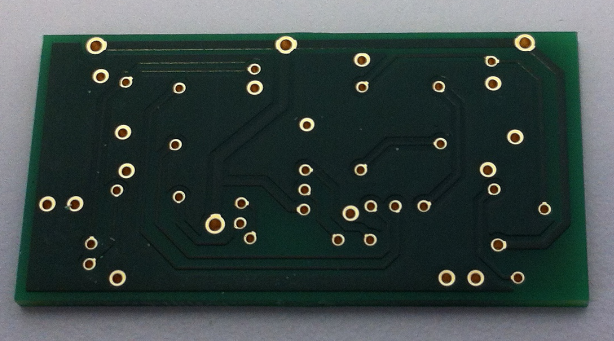
Encoder Bottom Side
The boards will be populated with SMD parts in the lab on Monday, so hopefully I will have some for the class on Tuesday next week.
Update: here is the board with all parts populated:
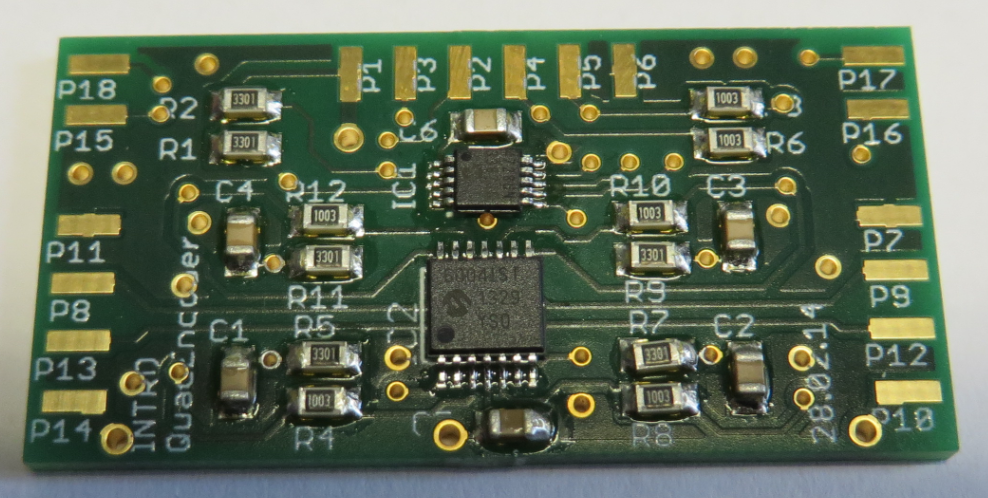
Encoder with parts populated
Happy Populating 🙂

I’m curious, will the students be doing dead reckoning projects? How involved does their coding get?
LikeLike
No, they use it for the PID (position and speed). Dead reckoning is hopeless with a system like this: the errors which get integrated by the system only would allow a dead reckoning for a very short time (maybe a few meters only). The mechanical characteristics (whell slippage, mechanical wheel tolerances, etc) will have too much error. If the tolerance would be less than 1%, it easily goes out of bound very fast. Dead reckoning would only work with absolute position (ground position) sensors, or with the help of additional reference points in the room. But the encoders are very good for relative positioning, e.g. turn the robot by 90 degrees, or move forward 10 cm.
LikeLike
Yes. I’m finding out the hard way about the limitations of the zumo for dead reckoning though I knew it was not a good fit from the start. Planning to build a better bot for dead reckoning using the optical encoders and thin wheels on the pololu 5″ chassis, not that it will be any more practical. Eventually I’ll move on to using external references.
Also thinking I might have a try at the SparkFun AVC competition in 2015. I’d do it this year but I know I don’t have the time.
LikeLike
I have been looking for the Eagle files for this encoder board. I can’t seem to find them. I’d like to created a slightly different design using 0.1″ spaced pin headers instead of soldering wires directly to the board. May I get the Eagle files for this board, with a parts listing?
LikeLike
Sure, but no parts listing:
https://github.com/ErichStyger/mcuoneclipse/tree/master/Eagle/INTRO%20Robot%20QuadEncoder
Could you create the parts listing (you should be able to easily get that with the schematics)?
LikeLike