
The Pololu Zumo chassis is nearly perfect for my needs: it is small and compact, and neatly works with the FRDM-KL25Z board. I’m able to use it for line following or maze solving. But it lacks a position (quadrature) encoder on the wheels which is either very useful or even required for the lecture assignments for my next class. The Pololu Zumo chassis mainly has been designed for Robot-Sumo competitions, where such quadrature sensors are not really needed. Pololu offers optical quadrature sensors for their 42×19 mm wheel which I used in this project. So why not adding these sensors to the Zumo chassis?
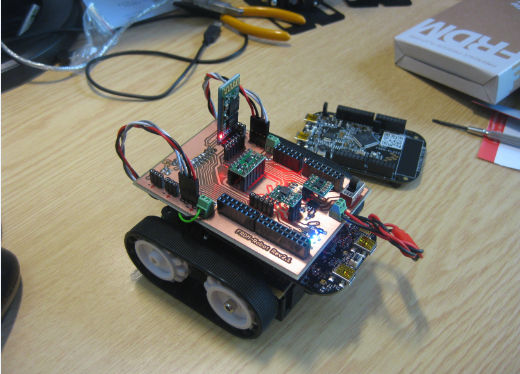
FRDM-Robot with Quadrature Sensors Mounted
